Réf. : S7730 V1
Date de publication :
10 juin 2000
Modélisation et commande
des robots manipulateurs
Date de dernière validation :
05 février 2015
Cet article est issu de : Automatique - Robotique | Robotique
par Alain LIÉGEOIS
Pour toute question :
Service Relation clientèle
Techniques de l’Ingénieur
Immeuble Pleyad 1
39, boulevard Ornano
93288 Saint-Denis Cedex
Document téléchargé le : 29/04/2020
Pour le compte : 7200045072 - imt mines albi // 193.50.45.187
Par mail :
infos.clients@teching.com
Par téléphone :
00 33 (0)1 53 35 20 20
© Techniques de l'Ingénieur | tous droits réservés
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Modélisation et commande
des robots manipulateurs
par
Alain LIÉGEOIS
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Professeur de l’université Montpellier-II, Institut des sciences de l’ingénieur
Enseignant-chercheur au Laboratoire d’informatique, de robotique
et de microélectronique de Montpellier (LIRMM )
tiwekacontentpdf_s7730 v1
1.
1.1
1.2
1.3
1.4
Morphologie ..............................................................................................
Graphe du mécanisme ................................................................................
Articulations ou « liaisons »........................................................................
Torseurs cinématique et dynamique d’un corps rigide............................
Degrés de liberté d’un mécanisme ............................................................
1.4.1 Premier mode de calcul .....................................................................
1.4.2 Second mode de calcul ......................................................................
2.
2.1
Changements de coordonnées directs ..............................................
Modèle géométrique direct ........................................................................
2.1.1 Structures arborescentes ...................................................................
2.1.2 Robots manipulateurs avec boucles cinématiques planes .............
2.1.3 Robots parallèles ................................................................................
Modèle cinématique direct .........................................................................
2.2.1 Structure de chaîne ............................................................................
2.2.2 Structures avec des boucles simples................................................
2.2.3 Robots parallèles ................................................................................
—
—
—
—
—
—
—
—
—
6
6
7
7
8
8
8
9
9
Changements de coordonnées inverses............................................
Modèle géométrique inverse......................................................................
3.1.1 Structures série...................................................................................
3.1.2 Robots avec des boucles....................................................................
3.1.3 Robots parallèles ................................................................................
Modèle cinématique inverse ......................................................................
3.2.1 Structures série...................................................................................
3.2.2 Robots avec des boucles simples .....................................................
3.2.3 Robots parallèles ................................................................................
—
—
—
—
—
—
—
—
—
9
9
10
10
10
11
11
11
11
Utilisation des matrices jacobiennes .................................................
Calcul des efforts statiques.........................................................................
Inerties de l’organe terminal vues par l’environnement ..........................
Indice de manipulabilité..............................................................................
Commande « jacobienne » .........................................................................
Commande en effort ...................................................................................
4.5.1 Retour par matrice de raideur ...........................................................
4.5.2 Commande d’impédance...................................................................
Commande hybride position-force ............................................................
—
—
—
—
—
—
—
—
—
12
12
12
13
13
13
13
14
14
Commande dynamique...........................................................................
Modèles théoriques de la dynamique .......................................................
5.1.1 Équations de Newton .........................................................................
5.1.2 Équations de Lagrange ......................................................................
Commande dynamique...............................................................................
5.2.1 Commande théorique : méthode des couples calculés ..................
5.2.2 Commande avec prédicteur...............................................................
—
—
—
—
—
—
—
14
14
14
15
15
16
16
Conclusion .................................................................................................
—
16
2.2
3.
3.1
3.2
4.
4.1
4.2
4.3
4.4
4.5
4.6
5.
5.1
5.2
6.
Pour en savoir plus...........................................................................................
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 - 3
—
3
—
3
—
4
—
5
—
5
—
5
Doc. S 7 730
S 7 730 − 1
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
________________________________________________________________________________
a maîtrise de la conception et du fonctionnement de mécanismes
complexes motorisés, ou « machines », a toujours été un facteur important
de progrès technologiques et parfois aussi sociaux et économiques dans divers
domaines : transports, production industrielle, travaux publics, exploration et
travail en milieux hostiles, imagerie médicale, etc. La conception, la fabrication
et le pilotage de ces machines ont été rendus possibles grâce aux connaissances scientifiques et techniques en mécanique, thermodynamique, électrotechnique et hydraulique. Ces machines sont destinées à augmenter les possibilités
de l’homme pour la rapidité de ses déplacements et de ses actions, et pour
l’amplification de sa force et de son champ d’action, notamment dans l’accomplissement de tâches pénibles, dangereuses et/ou répétitives. Les fonctions
généralement concernées sont :
— le déplacement à plus ou moins longue distance sur terre, sur mer, dans
l’air et sous l’eau ;
— la « manipulation » au sens large du terme :
• déplacer un outil pour saisir des objets ou de la matière, les transporter et
les déposer,
• exercer des efforts sur l’environnement ;
— la combinaison des deux fonctions précédentes.
Un robot manipulateur peut donc être considéré d’une manière générale, vu
par son environnement, comme un générateur de mouvements et d’efforts
dans les diverses directions de l’espace.
Sur le plan des applications les plus courantes, on peut distinguer :
— les robots industriels, travaillant généralement à poste fixe, de manière
totalement autonome, et dont les « tâches » sont programmées sur le site par
apprentissage, ou bien hors ligne en utilisant un langage spécialisé ou des
moyens de conception assistée par ordinateur ;
— les robots pour l’intervention et l’exploration en milieu hostile et mal connu
(nucléaire, planétaire, sous-marin ) qui sont le plus souvent téléopérés mais peuvent être dotés d’une certaine autonomie locale compte tenu des difficultés relatives aux délais des transmissions et à leur faible bande passante. Les outils de
la « réalité virtuelle » qui émergent dans de nombreux laboratoires et industries
sont susceptibles d’aider les opérateurs dans la commande des manipulateurs
dont sont dotés les véhicules robotisés.
Dans tous ces cas où les robots manipulateurs ne sont pas directement téléopérés et doivent posséder une certaine autonomie d’action, leurs systèmes de
commande automatique doivent connaître et compenser les imprécisions
éventuelles puisque l’opérateur humain n’est pas directement dans la boucle
d’asservissement, pour s’adapter aux caractéristiques des machines et de leur
environnement. Pour cela, il est nécessaire de passer par une modélisation
mathématique précise de la géométrie et de la dynamique des bras manipulateurs.
Cet article a pour but de familiariser le lecteur avec les principales notions
nécessaires à l’analyse de la morphologie d’un robot et de ses capacités de travail, afin de choisir et d’utiliser au mieux un robot industriel du commerce ou
même de concevoir une machine particulière mieux adaptée à ses besoins.
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
L
tiwekacontentpdf_s7730 v1
Le lecteur est invité à se reporter à l’article [R 7 734] traitant de l’application de la réalité virtuelle à la robotique, et plus généralement aux articles [R 7 700] et suivants du présent traité
consacrés à la robotique.
S 7 730 − 2
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
________________________________________________________________________________ MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
1. Morphologie
Un robot manipulateur est constitué par l’assemblage de corps
(segments) rigides en première approximation, et articulés entre
eux. Les articulations peuvent être motorisées (actives) ou non
(articulations passives).
1.1 Graphe du mécanisme
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Pour décrire la topologie du mécanisme constituant le robot
manipulateur, on lui associe un graphe dont les sommets sont les
corps constitutifs et les arcs représentent les assemblages entre
ces corps. Deux corps extrêmes ont des rôles particuliers :
— la base, qui est fixée au sol ou sur un véhicule ;
— l’organe terminal qui porte l’outil (ou effecteur).
tiwekacontentpdf_s7730 v1
En partant de la base pour aller vers l’effecteur, on pourra
distinguer :
— les structures série, ou sérielles, pour lesquelles le graphe est
arborescent, la base étant la racine et les feuilles étant les organes
terminaux (dans le cas général où il y en aurait plusieurs) (figure 1
par exemple) ;
— les structures parallèles pour lesquelles toutes les chaînes
partent de la base pour aller vers l’organe terminal [4] (figure 2 par
exemple) ;
— les structures mixtes, présentant des boucles cinématiques,
par exemple des parallélogrammes ou des motorisations par
vérins linéaires (figure 3 par exemple).
Base attachée à un porteur
Corps des vérins
1.2 Articulations ou « liaisons »
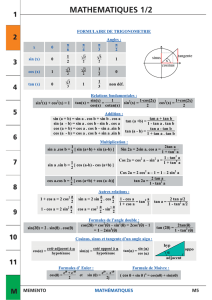
On admettra qu’un corps solide rigide isolé dans l’espace à trois
dimensions possède six degrés de liberté : trois composantes d’un
vecteur position et trois composantes d’orientation. Les divers formalismes pratiques utilisés pour quantifier ces degrés de liberté
sont précisés au paragraphe 1.4. Quand on relie un tel corps à un
autre, au moyen de « liaisons » mécaniques, il perd de sa mobilité
par rapport au second. On peut imaginer diverses combinaisons de
translations et de rotations, dont quelques-unes sont représentées
sur la figure 4.
Tiges des vérins
Pince
Figure 2 – Exemple de structure parallèle. Poignet à compliance
active développé par C. Reboulet (doc. ONERA/CERT, Toulouse)
Poignet
Avant-bras
Dispositif
d'accouplement
Bras
Avant-bras
Bras
Épaule
Base
Base
Figure 1 – Exemple de structure série. Bras (doc. Adept)
Figure 3 – Exemple de structure mixte. Robot avec boucles
(doc. Afma Robots)
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 − 3
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
tiwekacontentpdf_s7730 v1
________________________________________________________________________________
a 5
b 4
c 4
d 4
e 3
f 3
g 3
h 2
i 2
j 1
k 1
l 1
Le chiffre indique le nombre de degrés de liberté de la liaison
Figure 4 – Liaisons. Paires cinématiques
Dans l’assemblage de robots manipulateurs, les liaisons les plus
courantes sont :
— la liaison rotoïde R (ou pivot) à un degré de liberté
(figure 4j ) ;
— la liaison prismatique P (ou glissière) à un degré de liberté
(figure 4k ) ;
— la liaison rotule S (sphérique) à trois degrés de liberté, équivalente à R3 (figure 4f ) ;
— la liaison cardan U (joint universel) à deux degrés de liberté,
équivalente à R2 (figure 4i ).
Nous avons également représenté des liaisons unilatérales
(figures 4a, c et g ) qui ne servent pas à proprement parler dans
l’assemblage de mécanismes, mais peuvent représenter localement (une surface est approchée par son plan tangent) des relations temporaires entre l’organe terminal du robot et son
environnement.
D’autres liaisons, comme le roulement sans glissement, équivalent à un mouvement plan sur plan, existent dans les cames et les
réducteurs à engrenages (figure 5). Comme dans le système visécrou (figure 4l ), elles ne rajoutent pas de degré de liberté puisque
l’on peut écrire, en coordonnées polaires :
r1 dθ1 + r2 dθ2 = 0
S 7 730 − 4
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
avec
r 1 + r 2 = constante
(1)
r1
r2
θ2
Origine de θ2
θ1
Origine de θ1
Figure 5 – Came ou engrenage
1.3 Torseurs cinématique et dynamique
d’un corps rigide
Le mouvement d’un corps solide rigide est déterminé à chaque
instant par le vecteur vitesse V d’un de ses points (son centre
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
________________________________________________________________________________ MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
d’inertie G par exemple) et par son vecteur vitesse instantanée de
rotation V (le même pour tous les points du solide). L’ensemble
des forces extérieures qui agissent sur lui peut être réduit à un vec-
Base
Pivot
teur force résultante F et à un vecteur moment résultant M . Les
équations de la dynamique du corps solide (équations de Newton)
s’écrivent, dans un repère fixe (galiléen) :
dV
m ---------- = F
dt
d
------ I • V = M
dt
Bras
(2)
Cardan
Avant-bras
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
avec
tiwekacontentpdf_s7730 v1
m
masse du corps,
I
son tenseur d’inertie (d’ordre 2) au point de référence
considéré.
Cardan
Corps terminal
(« nacelle »)
Le point • symbolise le produit « contracté » de tenseurs.
Dans le cas où le corps est soumis à une liaison, il perd des
degrés de mobilité. Si l’on suppose la liaison parfaite, c’est-à-dire
sans frottement, les composantes des efforts aux contacts (forces
et/ou moments) sont donc localement orthogonales aux vitesses.
Cette remarque nous permet de tester la validité d’un mécanisme
(§ 1.4).
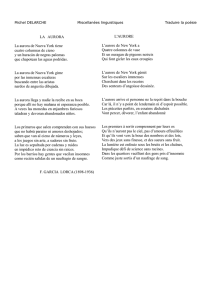
Figure 6 – Concept simplifié du robot Delta (d’après [4])
Bras
1.4 Degrés de liberté d’un mécanisme
On suppose que les conditions théoriques nécessaires à un
mécanisme complexe sont :
1. il y a le nombre de moteurs actifs nécessaire et suffisant ;
2. il n’y a pas de contrainte interne non calculable (le mécanisme n’est pas hyperstatique).
Nota : on verra dans les calculs de changement de coordonnées que ces conditions peuvent exceptionnellement être transgressées dans quelques configurations « singulières »
du mécanisme.
1.4.1 Premier mode de calcul
Soit N le nombre de degrés de liberté recherché (c’est le nombre
nécessaire de moteurs). On a :
N =
avec
∑
Ni
liaisons i
– 6b
(3)
Ni
nombre de degrés de liberté de la liaison i,
b
nombre de boucles cinématiques (nombre de corps
qu’il faut couper pour rendre le graphe du mécanisme
arborescent).
1.4.2 Second mode de calcul
Soit n le nombre de corps mobiles. Les équations de Newton
contiennent donc 6 n inconnues, par exemple les efforts à exercer
pour obtenir des mouvements donnés (ou tout simplement l’équilibre statique). Toutefois, à chaque articulation i, N i composantes
du tenseur des efforts sont nulles d’après l’hypothèse de nonfrottement. Il reste donc N inconnues que l’on doit imposer par des
moteurs, avec :
N = 6n –
∑ ( 6 – Ni )
liaisons i
(4)
Avant-bras
Figure 7 – Concept original du robot Delta (d’après [4])
Exemple 1 : un des concepts du robot parallèle Delta [4]
(figure 6).
Il possède trois articulations rotoïdes, ou pivots, et six joints de cardan, soit au total quinze degrés de liberté aux articulations. Il possède
également deux boucles cinématiques : il suffit de couper deux bras
par exemple pour rendre la structure arborescente. Le nombre de
degrés de liberté de l’ensemble est donc égal à 15 – (6 × 2) = 3. Les
mouvements du corps terminal doivent donc être assurés par trois
moteurs. Dans le robot réel, ce sont les trois pivots qui sont motorisés.
Pour utiliser le second mode de calcul, qui donne une idée plus précise
des variables à calculer pour faire par exemple une étude des contraintes et dimensionner les segments, on recense sept corps : trois avantbras, trois bras et le corps terminal. Il y a donc a priori 6 × 7 = 42 équations de la dynamique. Toutefois, dans chaque pivot, il n’y a que cinq
composantes d’efforts au contact (trois composantes de la force et
deux composantes du moment), et dans chaque liaison de cardan, il y
en a quatre (trois composantes de la force et une composante du
moment). Cela fait donc (3 × 5 + 6 × 4) = 39 inconnues des efforts
transmis mécaniquement, et il reste donc bien 42 – 39 = 3 composantes de moments à motoriser.
Exemple 2 : concept original du robot Delta
L’avant-bras est constitué par un parallélogramme (figure 7) dont
chaque biellette est fixée par des rotules respectivement au bras et à
la nacelle. Avec l’hypothèse d’articulations sans frottement, on obtient
des mouvements incontrôlables par les trois moteurs : il y a pour
chaque bras treize degrés de liberté, soit trente-neuf au total. Chaque
parallélogramme rajoute une boucle cinématique, il y en a donc cinq.
On calcule alors N = 39 – 30 = 9.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 − 5
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
,
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
,,,
,,,
,,,
U
________________________________________________________________________________
Zn
S
Zn
Yn
Xn
Yn
Xn
R
S
a aspect bras gauche
et coude bas
b aspect bras droit
et coude bas
T
R
Zn
Zn
Yn
U
Xn
Yn
Xn
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Figure 8 – Mécanisme « un axe » avec boucles
tiwekacontentpdf_s7730 v1
Cela signifie que sans frottement, chacune des six biellettes peut
tourner librement autour de son axe longitudinal. Pour rendre la représentation cinématique correcte, il suffit de remplacer la liaison rotule à
une extrémité par une liaison cardan. Dans le mécanisme réel, l’assemblage est plus complexe [4].
Exemple 3 : motorisations par vérins linéaires
La figure 8 schématise un robot, « un axe » (qui peut être une partie
d’un robot série-parallèle). Des liaisons correctes sont écrites sur la
figure. Il y a au total treize degrés de liberté dans les articulations, et
deux boucles, ce qui donne bien un degré de liberté pour le
mécanisme : la translation active du vérin. Remarquons que pour
mieux mettre en évidence cette dernière, nous avons, pour la tige du
vérin et sa fixation au bras, remplacé une liaison verrou (figure 4h ) plus
une liaison de cardan par une liaison prismatique plus une rotule. Sur
cet exemple, on peut aussi vérifier qu’il y a cinq corps mobiles, donc
trente équations, et vingt-neuf inconnues. Ces dernières peuvent donc
être calculées en fonction de la seule force motrice agissant selon l’axe
du vérin. Les forces de pesanteur sont en effet supposées également
connues. Si la base est mobile (manipulateur embarqué sur un véhicule
par exemple) avec un mouvement connu, on peut de même rajouter
sur chaque corps une force d’inertie due à ce mouvement.
c aspect bras gauche
et coude haut
Figure 9 – Divers aspects pour une même pose
du bras du robot PUMA
démontre qu’une même pose peut être obtenue par plusieurs
configurations. Nous avons appelé aspects les classes de configurations différentes [1].
2.1 Modèle géométrique direct
Il exprime la position et l’orientation du repère de référence Routil
lié à l’outil, relativement à un repère fixe — celui de la base R 0 par
exemple — en fonction des variables articulaires motorisées (et
asservies électroniquement) q 1 , q 2 ... qN du mécanisme. L’élément
fondamental qui décrit la position et l’orientation d’un repère Ri ,
d’origine Oi , dans un repère Rj peut se mettre sous la forme d’une
matrice de dimensions (4,4) :
Xi
j
2. Changements
de coordonnées directs
On associe à chaque corps i du mécanisme un repère orthonormé direct {Xi , Yi , Z i } noté Ri . Les repères particuliers sont
d’une part celui de la base {X 0 , Y0 , Z0 } noté R0 et d’autre part
celui, Rn , de l’organe terminal {Xn , Yn , Zn }. Le repère de la base
occupe une position et une orientation connues par rapport à un
repère fixe si le robot est à un poste fixe dans un atelier, ou lié à
un véhicule porteur sur lequel la base est fixée rigidement. Le dernier repère Rn peut être aussi bien lié au dispositif d’accouplement
de l’effecteur qu’à ce dernier qui lui est rigidement attaché. Sa
situation instantanée s’appelle une pose.
C’est l’action sur N effecteurs qui permet de situer l’organe terminal par rapport à un repère lié à la base et/ou d’exercer au
moyen de cet organe des efforts sur l’environnement. On note
généralement q 1 , q 2 ... qN les variables de position (angulaire ou
linéaire) des effecteurs actionnant les articulations actives que
nous avons recensées dans la section précédente. Ces variables
définissent la configuration instantanée du mécanisme. La figure 9
S 7 730 − 6
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
d aspect bras droit
et coude haut
Ti =
j
0
Yi
j
Zi
Oj Oi
j
j
(5)
1
0
0
où les composantes des vecteurs sont mesurées dans le repère Rj .
Dans cette matrice (4,4), on remarque que la quatrième colonne
est la représentation d’un vecteur en coordonnées « homogènes »
(quatre composantes) [2].
La matrice (3,3) suivante :
j
Ri = X i
j
Yi
j
Zi
(6)
j
représente la rotation entre les deux repères. Ses éléments sont les
cosinus directeurs : les cosinus des angles respectifs entre les vecteurs unitaires du repère Ri et ceux du repère Rj .
Pour spécifier une rotation, cette matrice présente un nombre
surabondant de paramètres (neuf) qui doivent être reliés par les six
contraintes exprimant que le repère est orthonormé. On peut donc
en pratique ne spécifier que trois paramètres, par exemple les
angles de lacet (λ ), tangage (θ ) et roulis (ρ ) par analogie avec la
terminologie des pilotes de véhicules, d’avions notamment. La
figure 10 montre la définition de ces angles, ce qui donne la
matrice de rotation :
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
________________________________________________________________________________ MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
cos λ
ji
j
Ri = sin λ
ji
0
– sin λ ji
cos λ ji
0
0
1
0
0
0
cos θ ji
– sin θ ji
– sin θ
1 0
0
ji
cos θ ji
cos ρ ji
0
0
1
0
0
cos ρ ji
– sin ρ
ji
sin ρ ji
=
cos λ ji cos ρ ji
–
sin λ ji sin θ ji sin ρ ji
– sin λ ji cos θ ji
cos λ ji sin ρ ji
sin λ ji cos ρ ji
+
cos λ ji sin θ ji sin ρ ji
cos λ ji cos θ ji
sin λ ji sin ρ ji – cos λ ji sin θ ji cos ρ ji
sin θ ji
cos θ cos ρ
ji
ji
– cos θ ji sin ρ ji
sin λ ji sin θ ji cos ρ ji
+
(7)
composition des changements de repères successifs le long de la
chaîne. Par exemple, pour une seule chaîne de n corps :
θji
//Zj
0
ρji
θji
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
tiwekacontentpdf_s7730 v1
λji
Oi
//Yj
λji
Xi
Figure 10 – Angles de lacet, tangage et roulis
– sin θ i
cos θ i
i–1
Ti =
n
Tn Toutil
(8)
0
di
cos α i sin θ i
cos α i cos θ i
– sin α i
– ri sin α i
sin α i sin θ i
sin α i cos θ i
cos α i
ri cos α i
0
0
0
1
(9)
Xi
Zi
2.1.2 Robots manipulateurs
avec boucles cinématiques planes
θi
//Xi – 1
Oi
αi
//Zi – 1
ri
Xi – 1
n –1
La variable articulaire active qi associée à l’articulation i est soit
θi (articulation rotoïde), soit di (articulation prismatique). La
composition des transformations élémentaires conduisant du
repère Ri – 1 au repère Ri conduit à la matrice de passage (composantes exprimées dans Ri – 1) :
ρji
Zi – 1
1
Il est usuel de représenter les matrices de transformations qui
font passer d’un corps au suivant au moyen du formalisme de
Denavit et Hartenberg modifié par Khalil [2]. Chaque articulation i
est alors motorisée, en pratique par un moteur linéaire ou rotatif.
Il doit y avoir n moteurs.
La figure 11 montre les paramètres intervenant dans la transformation. Ces paramètres sont :
— αi angle entre Zi – 1 et Zi (rotation autour de Xi – 1) ;
— di distance entre Zi – 1 et Zi le long de Xi – 1 ;
— θi angle entre Xi – 1 et Xi (rotation autour de Zi ) ;
— ri distance entre Xi – 1 et Xi le long de Zi .
Yi
Zi
//Xj
0
Toutil = T1 T2 ...
di
Normale commune
Oi – 1
Dans ce cas, il existe encore toujours une chaîne cinématique
« principale » entre la base et l’organe terminal. C’est elle qui
assure la précision de la pose. On peut encore décrire la situation
de l’outil, par rapport à la base, par le produit des matrices de la
chaîne principale. Mais alors certaines variables articulaires (paramètres θi ou d i de la formulation de Denavit et Hartenberg) ne sont
plus directement actionnées par les « axes » qi des moteurs.
Lorsque les boucles sont planes, il est aisé de calculer les variables
articulaires en fonction des qi et de porter ce résultat dans les
matrices de passage de la chaîne principale. Dans l’exemple 3
(figure 8), il suffit d’appliquer les relations fondamentales dans un
triangle pour obtenir l’orientation du bras principal en fonction de
l’élongation de la tige du vérin. D’après les notations de la
figure 12, on obtient alors :
X S = L cos α
Y = h + L sin α
S
2
2
2
q = ( XS – , ) + Y S
Figure 11 – Paramètres de Denavit et Hartenberg
2.1.1 Structures arborescentes
On considère les chaînes qui relient la base à chaque outil. Dans
le repère de la base, la position et l’orientation de ce dernier
s’obtiennent par un produit de matrices (4,4), correspondant à la
d’où
q =
2
2
2
L + , + h – 2 L ( , cos α – h sin α)
(10)
Inversement, il nous faut α pour en déduire l’angle articulaire θ.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 − 7
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
,
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
,,,
,,,
,,,
Y
θ
h
,
α
________________________________________________________________________________
ticiens préfèrent inverser le modèle géométrique inverse qui est,
lui, relativement facile à obtenir pour une structure parallèle,
quand les « bras » ne présentent pas de singularité.
2.2 Modèle cinématique direct
Ce modèle décrit les vitesses de l’organe terminal en fonction
des dérivées, par rapport au temps, des variables actives. La
vitesse instantanée du corps solide qui constitue l’organe terminal
(en supposant pour simplifier qu’il n’y en a qu’un) relativement à
la base est entièrement déterminée par la vitesse :
S
L
q
X
la base, et par la vitesse de rotation instantanée V outil
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
tiwekacontentpdf_s7730 v1
2
2
2
L + , +h –q
, cos α – h sin α = --------------------------------------------2L
(11)
Pour cela, on introduit l’angle β tel que :
,
h
sin β = ------------------------ et cos β = -----------------------2
2
2
2
, +h
, +h
2
2
L + , +h –q
sin ( β – α ) = --------------------------------------------2
2
2L , + h
(12)
qui ne peut avoir une solution donnant α que si la fraction du
second membre est comprise entre – 1 et + 1. On voit donc qu’un
cas limite est obtenu lorsque :
(L ± q ) 2 = h 2 + ,
2
Ce cas peut être facilement généralisé à une structure arborescente : il suffit de considérer chaque chaîne qui conduit de la base
à un corps terminal.
Les vitesses de l’organe terminal sont obtenues par composition
des vitesses des corps constituant la chaîne cinématique.
Si l’articulation active i est rotoïde, on a qi = θi , et alors :
V i = V i – 1 + q̇ i Z i
0
0
0
˙
˙
= O
+ V ∧ ( di X i – 1 + ri Z i )
Oi
i
i –1
0
0
2.1.3 Robots parallèles
Pour positionner et orienter l’organe terminal dans l’espace, un
robot parallèle doit avoir six articulations motorisées, mais il a obligatoirement en plus un grand nombre d’articulations passives. Plusieurs chaînes complexes conduisent de la base à l’organe
terminal. Si l’on désire le modèle géométrique direct, on ne peut
pas l’obtenir analytiquement. En effet, il faut écrire les matrices de
passage de toutes les chaînes (au nombre de six) puis exprimer
comme contraintes que toutes ces transformations fournissent la
même pose de l’organe terminal. Cela nécessite des calculs numériques complexes utilisés uniquement dans les systèmes de CAO
(conception assistée par ordinateur), et c’est pourquoi les automa-
(15)
0
Si l’articulation active i est prismatique, on a qi = ri et l’on peut
écrire :
Vi
˙
Oi
Un autre cas courant simple, qui lui ne présente pas de singularité, est la prise en compte éventuelle des transmissions (réducteurs à engrenages, courroies, câbles, etc.) entre des moteurs et les
articulations commandées. Les relations entre les variables des
moteurs et les variables articulaires sont alors linéaires.
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
0
Il faut noter que les composantes de ce dernier vecteur ne sont
pas les dérivées, par rapport au temps, de vraies variables d’orientation, comme les angles de roulis, tangage et lacet, bien qu’elles
leur soient liées [1]. Il en est de même des dérivées des cosinus
directeurs de la matrice d’orientation de l’organe terminal. Le choix
de la vitesse instantanée de rotation permet dans un premier
temps de s’affranchir d’un quelconque ensemble de variables
d’orientation.
(13)
correspondant théoriquement aux positions du vérin agissant
selon l’axe qui porte le segment de longueur L. Dans de telles positions le mouvement de la tige du vérin est impossible. En pratique,
les butées du mécanisme font que l’on ne se trouve pas dans de
tels cas. Toutefois, ce problème se posera de manière encore plus
cruciale dans les robots parallèles [4].
S 7 730 − 8
= Vn
2.2.1 Structure de chaîne
On doit donc avoir :
2
0
de cet organe terminal.
On l’obtient théoriquement à partir de :
2
(14)
0
du point de référence de l’organe terminal par rapport au repère de
Figure 12 – Résolution d’une boucle de l’exemple 3 (figure 8)
2
˙
dO0Ooutil
O outil = --------------------------dt
0
0
= Vi – 1
˙
= O
i
–1
0
0
(16)
+ q̇ i Z i
0
Les équations (15) et (16), appliquées successivement depuis la
base jusqu’à l’extrémité de la chaîne, permettent d’exprimer les
vitesses de l’organe terminal en fonction des dérivées des variables de configuration. Sous forme matricielle, on a :
˙
On
Vn
avec
= J 0 ( Q ) Q˙
(17)
0
J0
matrice de dimensions (6,n ), c’est-à-dire (6,6) pour
un robot non redondant,
Q
vecteur-matrice colonne (n ,1) dont les composantes
sont les qi .
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
________________________________________________________________________________ MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
La matrice J 0 est fonction des qi puisque les équations qui permettent de calculer les vitesses dans le repère de la base font intervenir les matrices de passage
de configuration.
i –1
0
– V Z0
VY 0
V Z0
0
– VX0
– V Y0
V X0
0
VX0
Vn
avec
0
= VY0
(19)
V Z0
Si l’on veut maintenant calculer les dérivées, par rapport au
temps, de coordonnées opérationnelles mesurables, par exemple
les coordonnées cartésiennes du point de référence de l’organe
terminal et les angles de roulis, tangage et lacet de son repère de
référence, il faut exprimer en particulier les relations entre la
Puisqu’une matrice de rotation est orthogonale, on en déduit les
expressions des composantes de la vitesse angulaire par la
formule :
0
0
0 –1
0 T
Ṽ = R˙ R = R˙ R
(20)
vitesse angulaire Vn
où l’exposant T dénote la transposition de matrice.
La relation (7) est l’expression d’une matrice de rotation en fonction des angles de roulis, tangage et lacet (§ 2.1). Il suffit de la dériver par rapport au temps et d’appliquer l’équation (20) pour obtenir
les relations entre les dérivées des variables d’orientation et les
dérivées des variables articulaires. Dans le cas présent où l’on
s’intéresse au corps terminal, on a :
et les dérivées des variables d’orientation.
0
0
0
R˙n = Ṽn Rn
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Ṽn =
Ti qui contiennent ces variables
On peut commencer simplement par faire intervenir la matrice des
cosinus directeurs et sa dérivée. On démontre [1] que l’on peut
écrire en particulier pour le corps n :
tiwekacontentpdf_s7730 v1
où l’on a noté :
0
Rn =
(18)
n
n
n
n
n
cos λ 0 n cos ρ 0 n – sin λ 0 n sin θ 0 n sin ρ 0 n
– sin λ 0 n cos θ 0 n
cos λ 0 n sin ρ 0 n + sin λ 0 n sin θ 0 n cos ρ 0 n
sin λ 0 n cos ρ 0 n + cos λ 0 n sin θ 0 n sin ρ 0 n
cos λ 0 n cos θ 0 n
sin λ 0 n sin ρ 0 n – cos λ 0 n sin θ 0 n cos ρ 0 n
– cos θ 0 n sin ρ 0 n
sin θ 0 n
Les trois premières composantes d’un vecteur « vitesse des
coordonnées opérationnelles » sont tout naturellement les composantes de la vitesse du point de référence terminal dans le repère
de la base.
On obtient ainsi finalement une relation de la forme :
˙
(22)
X˙ = J (Q ) Q
( 6, n ) ( n ,1 )
( 6,1 )
J (Q ) est ainsi la matrice jacobienne (cf. article Calcul différentiel
[AF 55] dans le traité Sciences fondamentales) de la fonction vectorielle f qui définirait un modèle géométrique direct de la forme :
X = f (Q )
(23)
(21)
cos θ 0 n cos ρ 0 n
2.2.3 Robots parallèles
Comme le modèle géométrique direct, le modèle cinématique
direct ne s’obtient pas simplement pour de tels mécanismes. On
préfère inverser le modèle cinématique inverse qui est, lui, relativement facile à obtenir (§ 3.1.3).
3. Changements
de coordonnées inverses
quand il existe explicitement.
2.2.2 Structures avec des boucles simples
Comme il a été écrit plus haut (§ 2.1.2), il existe une chaîne principale qui conduit de la base vers l’extrémité, mais alors certaines
articulations de cette chaîne sont passives (non motorisées directement). Il est cependant possible, au paragraphe 2.2.1, d’écrire un
modèle cinématique direct en fonction de toutes les variables articulaires, motorisées ou non, de la chaîne principale, puis d’utiliser
les relations entre les variables des articulations passives et les
coordonnées qi motrices, ainsi que les dérivées, pour « éliminer »
les premières et obtenir une matrice jacobienne comme dans
l’équation (22).
Prenons l’exemple simple de boucles planes déjà vu (§ 2.1.2), et
introduisons les paramètres de dimensions (voir figure 12). La
variable active est la longueur q du vérin et la variable passive de
la chaîne principale est par exemple l’angle θ. Ce dernier est égal
à l’angle α plus un angle constant. Le repère {X, Y } est par exemple un repère local. La relation (10) :
q =
2
2
L’organe terminal d’un robot manipulateur doit effectuer des
mouvements et/ou exercer des efforts dans un repère qui est lié à
l’espace opérationnel (l’atelier). L’opérateur qui programme un
robot par des moyens évolués [5] lui fournit des instructions définies dans cet espace. Par contre, même s’il est doté de capteurs
extérieurs (de position, de force) permettant de l’asservir localement à la tâche, le robot a ses asservissements élémentaires
bouclés sur les informations issues de ses capteurs internes (articulaires) et mesurant plus ou moins directement les qi et/ou les γ i .
L’armoire de commande du robot doit donc contenir un module
(un programme implanté sur calculateur numérique) qui calcule les
consignes à envoyer aux asservissements « articulaires » en fonction des valeurs des variables de position, d’orientation et/ou
d’efforts désirées dans l’espace opérationnel. Ces calculs font
appel aux modèles théoriques des transformations de coordonnées inverses. Une condition nécessaire d’existence de ces
modèles (nombre fini de solutions) est que le robot ne soit pas
redondant vis-à-vis de la tâche : le nombre de variables opérationnelles spécifiées est égal à N, nombre de degrés de liberté du
mécanisme.
2
L + , + h – 2 L ( , cos α – h sin α)
a été utilisée pour obtenir le modèle géométrique direct (23). Par
dérivation de ce dernier, on obtient l’expression de dθ en fonction
de dq , en dehors des cas limites (singularités ). En effet, on a dans
ces cas :
cos(β – α ) = 0,
et dθ /dq = dα /dq n’est pas défini.
3.1 Modèle géométrique inverse
En supposant les asservissements parfaits, on a égalité de leurs
sorties q i et des consignes de position correspondantes. Il s’agit ici
de calculer, si elle existe, l’application réciproque f –1 de celle du
modèle géométrique direct (23).
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 − 9
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
________________________________________________________________________________
Aucune solution réelle n’existe en dehors de ce que l’on nomme
l’espace de travail du robot [6]. De plus, il peut exister plusieurs
solutions en nombre fini (voir figure 9) ou en nombre infini dans
les singularités de la matrice jacobienne J associée à f.
Y
En dehors des singularités, et sans tenir compte des butées
mécaniques, il est impossible dans le cas général de savoir si un
mécanisme donné est soluble et quel est le nombre de solutions
quand il l’est. On peut toutefois avoir des informations dans des
cas simples en étudiant analytiquement le déterminant de la
matrice jacobienne : dét J [1]. Pour un robot série à six axes
rotoïdes, dont les trois axes du poignet sont concourants, il peut y
avoir théoriquement trente-deux solutions différentes Q (aspects)
pour une pose donnée.
Point de
référence
M
L
S
θ
S
R
P(q1)
P(q2)
R
P(q3)
U
U
X
3.1.1 Structures série
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Pour un grand nombre de robots manipulateurs dont les trois
axes du poignet sont concourants, il est possible de résoudre analytiquement le problème inverse par étapes.
tiwekacontentpdf_s7730 v1
La position du point de référence de l’outil et l’orientation de
l’outil sont données relativement au repère atelier. À un déplacement constant près, on peut considérer ici que ce dernier est
confondu avec le repère de la base du robot. Les données sont
0
ainsi [ O outil ] 0 et Routil . Par ailleurs, la situation de l’outil dans le
repère de référence du corps 6 est fixe. On en déduit les coordonnées du point d’intersection O4 = O5 = O6 des axes du poignet :
0
[O 6 ] 0 = [O outil ] 0 – Routil [O outil – O 6 ]6
(24)
La position du poignet permet alors de résoudre le « bras » et
d’obtenir, en dehors des cas singuliers, la (ou les) solution(s)
admissible(s) pour q 1 , q 2 et q 3 . À chaque solution correspond une
0
matrice de rotation R3 . Comme l’on a :
0
0
3
6
Routil = R3 R6 Routil
(25)
on en déduit :
3
3
0
R6 = R0 Routil
outil
R6
(26)
Cette dernière matrice ne fait intervenir que q 4 , q 5 et q 6 , que
l’on calcule alors.
Nota : on trouve dans la référence [2] les solutions pour un grand nombre de structures de robots industriels série du commerce.
3.1.2 Robots avec des boucles
On calcule alors le modèle géométrique inverse pour la chaîne
principale, puis on remplace les coordonnées articulaires passives
par leurs expressions en fonction des variables motorisées,
comme au paragraphe 2.1.2. La présence de boucles cinématiques
augmente le nombre de solutions théoriques et par là même la
complexité des calculs. En pratique, on ne retient que les solutions
techniquement réalisables.
Exemple 4
Dans le cas simple représenté sur la figure 12, on ne prend que la
solution q > 0, et normalement le mécanisme doit être construit pour
qu’il n’atteigne pas ses propres configurations singulières. La résolution du triangle est alors unique et correspond à la relation (10) où α ne
diffère de θ que par un angle constant.
3.1.3 Robots parallèles
Dans ce cas, la position et l’orientation de l’organe terminal qui
porte l’outil sont assurées par les configurations des divers
S 7 730 − 10
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
L2
L1
Figure 13 – Mécanisme parallèle à trois degrés de liberté
« bras » qui y conduisent, en partant de la base. Prenons le cas
d’un robot à six degrés de liberté et à six bras (par exemple celui
de la figure 3). Il y a cinq boucles et donc, d’après la formule (3),
la somme des degrés de liberté de l’ensemble des articulations des
bras est égale à 6 + (6 × 5) = 36. Pour que le système soit correctement défini, il faut six degrés de liberté par bras, que les bras
soient identiques ou non, et chacun d’entre eux peut alors être
résolu par la méthode donnée au paragraphe 3.1.1.
Nota : un exemple de résolution, celle du robot Delta à trois degrés de liberté, est
donné dans l’article Robots parallèles [R 7 710] du présent traité. Le principe est valable
dans le cas général.
Ici encore, on peut avoir des singularités. Nous détaillerons ce
problème à propos des modèles cinématiques (§ 3.2). D’autre part,
des contraintes technologiques peuvent éliminer des solutions, qui
sont hors du volume de travail du robot.
Considérons l’exemple simple de la figure 13. Ce mécanisme
comporte :
— trois articulations prismatiques actives P (vérins) ;
— deux rotoïdes R qui assurent, avec la première prismatique, la
précision de positionnement et d’orientation de la plate-forme
mobile ;
— deux rotules S ;
— deux cardans U.
L’ensemble comporte donc N = 15 – 6 × 2 = 3 degrés de liberté.
On voit en effet que normalement, on peut positionner (point M) et
orienter (angle θ ) l’axe de la plate-forme dans le plan de la figure
en agissant sur les vérins.
Pour simplifier l’exposé, on a noté qi la longueur totale du
vérin i.
q1 =
q2 =
q3 =
2
2
X M +Y M
2
2
( L1 – XM ) + Y M
(27)
2
( L 1 + L 2 – X M – L cos θ ) + ( Y M + L sin θ )
2
Ce modèle mathématique correspond à une configuration exécutable si et seulement si :
qi min < q i < qi max pour i = 1,2,3
ce qui correspond à une pose de la plate-forme appartenant à
l’espace de travail.
On remarque toutefois que théoriquement, si par exemple
YM = 0, on se trouve en singularité : si le mécanisme y arrive, aidé
par la gravité par exemple, il ne peut en sortir activement et reste
avec YM = 0.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
________________________________________________________________________________ MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
On obtient également d’autres configurations singulières quand
l’axe du troisième vérin est aligné avec celui de la plate-forme. On
ne peut alors pas modifier θ sans changer la position du point M.
De part et d’autre d’une configuration singulière se trouvent
des aspects différents.
u
M2
m
3.2 Modèle cinématique inverse
Ce modèle est nécessaire quand on spécifie la loi de vitesse de
l’organe terminal dans le repère atelier (ou plus simplement celui
de la base du robot) pour en déduire les lois d’évolution des variables articulaires asservies. Le problème revient donc à inverser la
matrice jacobienne J , quand c’est possible.
O
M1
Figure 14 – Coordonnées de Plücker
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
3.2.1 Structures série
tiwekacontentpdf_s7730 v1
Dans ce cas, on a toujours besoin de calculer au préalable le
modèle géométrique inverse. En effet, on a théoriquement deux
façons d’obtenir le modèle cinématique inverse :
— par dérivation du modèle géométrique inverse ;
— par inversion de la matrice jacobienne J .
On obtient ainsi, en dehors des singularités, une relation de la
forme :
–1
(28)
Q˙ = J ( Q )X˙
avec J –1 l’inverse de la jacobienne fonction de Q . Dans un
deuxième temps, il faut donc utiliser le modèle géométrique
inverse pour remplacer les qi par leurs valeurs numériques ou,
quand c’est possible, par leurs expressions en fonction de X .
Dans le cas de robots série, les singularités de la matrice
jacobienne (solutions de l’équation dét J = 0) correspondent à des
pertes de mobilité : les mouvements admissibles appartiennent à
des sous-espaces de l’espace des vitesses, normalement de dimension 6 pour la majorité des robots.
On peut éviter, soit par construction soit par « butées électroniques », d’atteindre les configurations singulières. De plus, on
peut prévoir dans le langage de programmation, de spécifier
l’aspect dans lequel doit s’effectuer le mouvement. C’est le cas du
langage VAL [5] pour le robot PUMA dont nous avons représenté
les divers aspects du bras sur la figure 9. Il y a en plus les singularités du poignet dont deux axes peuvent être alignés : on peut
donc avoir de part et d’autre de cette singularité retournement ou
non du poignet (flip ou no flip dans le langage de programmation).
3.2.2 Robots avec des boucles simples
On a étudié ce cas pour le modèle géométrique inverse, avec
l’exemple détaillé de la boucle de la figure 12. On peut traiter de
tels robots comme les robots série, en considérant la chaîne principale, puis remplacer dans l’expression de dX /d t les dérivées des
variables articulaires passives de la chaîne principale par leurs
expressions en fonction des dérivées dqi /dt des variables actives.
Ces dernières expressions sont obtenues en dérivant les relations
géométriques dans les boucles.
Une autre façon élégante fait appel aux coordonnées de
Plücker [3]. Tout actionneur i associé à une variable active qi produit une force ou un couple γ i le long ou autour de l’axe correspondant. Cet effort, si le mécanisme est supposé sans frottement,
contribue au vecteur F des efforts exercés par le corps terminal sur
son environnement. Considérons le modèle différentiel inverse que
l’on recherche. Il est de la forme :
dQ = G dX
avec
G
(29)
l’inverse de la matrice jacobienne du modèle direct.
Appliquons le principe des travaux virtuels : pour cela, on considère des déplacements virtuels dQ et dX compatibles avec les
contraintes du mécanisme et l’on écrit l’égalité des travaux des
forces pour ces déplacements :
FT dX = G T d Q
(30)
donc
FT dX = G T G dX
(31)
d’où
F = GT G
(32)
Il suffit donc de savoir exprimer la force et le moment résultant
au niveau de l’organe terminal en fonction des efforts actifs pour
obtenir la matrice G.
On considère pour cela les coordonnées de Plücker d’une droite
(figure 14).
Soit, dans l’espace à trois dimensions, une droite définie par
deux de ses points distinct M1 et M2 , et O l’origine d’un repère de
référence R0 . On considère deux vecteurs qui sont des invariants
de la ligne :
le vecteur unitaire u
son moment par rapport à O : m = OM ∧ u
où M est un point de la droite.
Les composantes de ces deux vecteurs fondamentaux s’obtiennent à partir des coordonnées de Plücker de la droite. Ces dernières sont les six composantes du vecteur colonne :
Dans la fabrication du mécanisme, on fait en sorte que les boucles
n’introduisent pas de singularités propres. Comme dans le cas d’un
robot à structure de chaîne, les configurations singulières sont obtenues quand le déterminant de la matrice jacobienne est nul.
U =
M1 M2
R0
(33)
OM 1 ∧ OM 2
R0
U
V = ----------------------- = u
M1 M2
m
R0
On a en effet :
3.2.3 Robots parallèles
Une première façon d’obtenir le modèle cinématique inverse des
robots parallèles consiste à dériver le modèle géométrique inverse.
(34)
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 − 11
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
________________________________________________________________________________
On peut associer un tel vecteur à l’axe de chaque articulation
motorisée. On obtient ainsi pour un robot à six axes V1 à V6 .
On va montrer que l’on a, dans le cas de moteurs linéaires [3] :
GT = [V1 ... V6]
La matrice jacobienne J et son inverse G ou J –1 ont des applications fondamentales dans l’analyse d’un mécanisme et dans sa
commande.
Le système mécanique étant en équilibre statique, on a :
i=6
∑ γ i ui
(35)
=F
i=1
4.1 Calcul des efforts statiques
i=6
∑ OOi ∧ γ i ui
=M
(36)
i=1
où O est le point de référence choisi.
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
En notations matricielles, les équations (35) et (36) donnent :
tiwekacontentpdf_s7730 v1
4. Utilisation des matrices
jacobiennes
V 1 V 2 ... V 6 G =
F
M
À partir du modèle cinématique, on peut écrire le modèle
différentiel :
(39)
dX = J (Q )dQ
Supposons que les variables qi soient directement les variables
associées aux déplacements relatifs des moteurs rotatifs ou linéaires. Chacun de ces derniers exerce une force ou un couple noté γ i ,
d’où pour l’ensemble des degrés de liberté un vecteur des efforts
G = [γ1γ2 ... γN]T.
Si l’on note F le vecteur à six composantes de la force et du
moment exercés par l’organe terminal sur l’environnement, le principe des travaux virtuels permet d’écrire :
R0
Donc, en dehors des singularités, on a :
G = J –1 = [V1 V2 ... V6]T.
Considérons l’exemple simple de la figure 13. La dérivation des
équations du modèle géométrique inverse (§ 3.1.3) donne :
∂ q2 ∂ q2 ∂ q2
----------- ----------- --------- =
∂X M ∂Y M ∂ θ
YM
------------------------------0
2
2
XM + Y M
YM
------------------------------------------------------0
2
2
( L1 – XM ) + Y M
Y M + L sin θ
L sin θ ( L 1 + L 2 – X M ) + LY M cos θ
-------------------------------------------------------------------------------------------------------------------------------q3
q3
(37)
0
L cos θ + X M – L 1 – L 2
-----------------------------------------------------------q3
Y M + L sin θ
------------------------------q3 L cos θ
^
L sin θ
L cos θ + X M – L 1 – L 2
-----------------------------------------------------------q3
Y M + L sin θ
------------------------------q3 -
(42)
En utilisant le modèle différentiel inverse d Q = J – 1 d X , on
obtient :
1
T –T
–1
(43)
E p = --- d X J KJ d X
2
Si maintenant on considère les coordonnées de Plücker des axes
des vérins, en se limitant aux composantes non nulles (deux pour
le vecteur unitaire dans le plan de la figure et une pour son
moment le long de l’axe perpendiculaire à ce plan) et en choisissant M comme point de référence, on obtient bien :
XM
XM – L1
---------------------------q1
q2
Y
YM , V =
M ,V =
V 1 = ------2
3
------q 1q 2-
Avec les matrices jacobiennes, on peut également définir une
« impédance » (raideur) du robot manipulateur vu par l’environnement. Imaginons que les raideurs au niveau des moteurs définissent une matrice K. Sans tenir compte de la pesanteur, l’énergie
potentielle du mécanisme, pour un changement de configuration
virtuel dQ , est de la forme :
1
T
E p = --- dQ K dQ
2
2
2
( L 1 + L 2 – X M – L cos θ ) + ( Y M + L sinθ) pour alléger l’écriture.
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
(41)
et les singularités à considérer pour obtenir F sont donc ici celles
de G.
Nota : dans la troisième ligne, on a écrit q3 au lieu de
S 7 730 − 12
F = J –T G
F = GT G
∂ q 3 ∂ q 3 ∂q 3
----------- ----------- --------∂ X M ∂ Y M ∂θ
0
(40)
d’où :
qui donne la répercussion des efforts moteurs sur l’environnement, en dehors des singularités. Pour un robot parallèle, on avait
au paragraphe précédent démontré directement ces formules.
Cependant on avait obtenu la relation (32) :
∂ q1 ∂ q1 ∂ q1
----------- ----------- --------∂X M ∂Y M ∂ θ
XM
------------------------------2
2
XM + Y M
–L1 – XM
------------------------------------------------------2
2
( L1 – XM ) + Y M
L cos θ + X M – L 1 – L 2
--------------------------------------------------------------q3
F T d X = G T dQ
(38)
Donc Kext = J –TKJ –1 apparaît comme la matrice de raideur du
mécanisme vu depuis l’espace opérationnel.
4.2 Inerties de l’organe terminal
vues par l’environnement
Nous montrons que la matrice jacobienne intervient également
dans le calcul de l’inertie du robot comme si un opérateur extérieur
essayait de le déplacer (l’accélérer) en agissant sur son organe terminal, si les liaisons étaient idéalement sans frottement. En effet,
pour tout système mécanique, l’énergie cinétique Ec est une fonction quadratique des vitesses, qui peut s’exprimer en fonction des
vitesses des variables qi :
1 T
E c = --- Q̇ A ( Q ) Q̇
2
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
(44)
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
________________________________________________________________________________ MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
avec A (Q ) matrice (n,n ) symétrique définie positive dépendant des
masses et des inerties de chaque corps mobile, fonction de la
configuration instantanée Q du mécanisme.
(dXd )k
En utilisant le modèle cinématique inverse, quand il existe, on
obtient :
1 T –T
–1
(45)
E c = --- Ẋ J ( Q ) A ( Q ) J ( Q ) Ẋ
2
+
Σ
JT (Qk )
( Qd ) k
–
d Qk
Robot
et
servos Q
k
J ( Qk )
La matrice J –T(Q ) A (Q )J –1(Q ) apparaît donc comme une matrice
de masses et d’inerties généralisées dans l’espace opérationnel.
À partir du repos, les capacités d’accélérations du robot vues
dans cet espace seront d’autant mieux isotropes que translation et
rotation sont mieux découplées, l’idéal étant que :
Kv
Figure 15 – Commande jacobienne
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
1. la matrice soit de la forme :
tiwekacontentpdf_s7730 v1
m
0
0
I
4.4 Commande « jacobienne »
2. les valeurs propres de [m ] soient égales, et les valeurs propres de [ I ] soient égales. Comme la matrice dépend de la configuration Q, ces conditions ne peuvent jamais être satisfaites dans
tout le volume de travail, mais éventuellement dans quelques
configurations particulières.
Cette analyse permet au programmeur du robot de choisir des
configurations préférentielles quand il désire obtenir une accélération de l’organe terminal particulièrement importante dans telle ou
telle direction de l’espace.
Dans une commande par calculateur numérique, ce dernier
« bloque » la commande pendant chaque période d’échantillonnage de durée T. Les informations sur la configuration Q, provenant de capteurs, sont échantillonnées avec la même période. Soit
(dXd )k la variation de pose « désirée » à l’instant kT où la configuration est Qk . D’une manière idéale, d’après le modèle différentiel,
il doit en résulter une variation de configuration dQk telle que :
(dXd )k – J (Qk )dQk = 0
Pour essayer de réaliser cette condition, on cherche à minimiser
la fonction d’erreur :
1
f = --- ( d X d ) k – J ( Q k )d Q k
2
4.3 Indice de manipulabilité
Pour un robot série dans une configuration singulière, il y a perte
de degrés de mobilité de l’organe terminal puisqu’alors le vecteur
d X de ses déplacements élémentaires n’appartient plus à l’espace
des opérations de dimension 6, mais à un sous-espace de dimension égale au rang de la matrice jacobienne J.
On a pu ainsi définir un indice de manipulabilité w (Q ), nul pour
les configurations singulières, par :
w(Q) =
T
dét [ J ( Q ) J ( Q ) ]
(47)
On peut définir des ellipsoïdes de manipulabilité qui traduisent
la facilité qu’a le robot à engendrer une vitesse linéaire et angulaire
dX /dt dans les directions de l’espace opérationnel. Ils ont pour
équation :
dXT(JJT)–1dX = constante
(48)
Les longueurs des demi-axes de ces (hyper)ellipsoïdes sont proportionnelles aux racines carrées des valeurs propres de JJ T.
On voit qu’il y a dualité avec des ellipsoïdes d’efforts (ces derniers étant perpendiculaires aux déplacements dans des déplacements virtuels sans frottement respectant les contraintes) qui
auraient pour équation :
FTJJTF = constante
T
( d X d ) k – J ( Q k ) dQ k
(51)
L’application de la méthode du gradient à la minimisation de
cette fonction conduit à l’application des variations suivantes des
consignes aux asservissements articulaires :
(d Qd )k + 1 = dQ k + K v J T (Qk)[(dXd)k – J (Qk )dQk ]
(52)
ce qui donne un schéma théorique représenté sur la figure 15.
Kv est une matrice de gains.
Nota : la méthode a été donnée à titre didactique, car il est souvent possible de calculer l’inverse de la matrice jacobienne, mais on verra intervenir ce type de boucle dans
les commandes en effort et hybrides.
(46)
Pour un robot non redondant, n = 6 et J est une matrice carrée.
L’expression de l’indice de manipulabilité est alors :
w ( Q ) = dét J ( Q )
(50)
(49)
En effet, les valeurs propres de (JJ T)–1 sont les inverses de celles
de JJ T.
Il en résulte qu’un robot ne peut pas simultanément se déplacer
à la vitesse optimale et exercer un effort maximal dans la même
direction [2].
4.5 Commande en effort
Les plus classiques sont les commandes dites « par retour
d’effort explicite ». Dans ce cas, une mesure des efforts entre
l’extrémité du robot et l’environnement vient corriger les consignes des asservissements articulaires.
4.5.1 Retour par matrice de raideur
Quand le robot est commandé en position dans l’espace opérationnel, on peut lui assurer une certaine compliance (inverse de la
raideur) vis-à-vis de l’environnement. Soit F le vecteur des efforts
mesurés dans l’espace opérationnel, on effectue une petite correction d Xd de la consigne de pose selon la loi :
dXd = KF F
avec
KF
(53)
inverse d’une matrice de raideur.
On peut avoir des problèmes d’instabilité avec une telle loi,
selon les valeurs des gains (coefficients de la matrice de compliance) quand la variation de déplacement conduit à quitter le
contact. Ce dernier est ensuite recherché par les asservissements
de position, des efforts sont à nouveau mesurés, et ainsi de suite.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 − 13
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
Le choix des directions de l’espace opérationnel ainsi commandées s’effectue par une matrice « de sélection » diagonale, de
dimensions (6,6), dont les éléments sont constitués de 0 et/ou de 1.
Les efforts commandés aux articulations par les moteurs sont :
J (Q)
•
X
•
Xd
________________________________________________________________________________
G = LpS (Xd – X ) + Lf (1 – S )(Fd – F )
–
+
Kv
+
Kp
Q
–
Lp et Lf respectivement les lois de commande en position et en
effort de l’espace opérationnel à l’espace articulaire. Elles font
donc intervenir les matrices J –1 (ou G ) et J T.
•
Q
+
Xd
JT (Q)
+
(56)
avec 1 matrice unité (6,6),
La figure 17 représente le schéma de principe de la commande
hybride.
Robot
X
X
Figure 16 – Commande d’impédance
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
5. Commande dynamique
tiwekacontentpdf_s7730 v1
Transformation
de coordonnées
X
–
Xd
S
+
Consignes
dans l'espace
opérationnel
Fd
+
F
Q
Robot
1–S
–
Commande
en position
+
transformation
inverse
+
Un robot manipulateur est une structure mécanique complexe
dont les inerties par rapport aux axes articulaires varient non seulement en fonction de la charge terminale, mais aussi en fonction
de la configuration. Les effets de la pesanteur varient également
avec cette dernière. Quand les articulations (les « axes ») sont
actionnées par l’intermédiaire de forts rapports de réduction, l’inertie vue par les moteurs varie peu. En effet, l’inertie de la charge
ramenée au moteur est divisée par le carré du rapport de réduction
(voir les articles sur les asservissements [R 7 500] et suivants du
présent traité). Dans ces cas, les asservissements peuvent être
assurés axe par axe par des réseaux classiques, PID notamment
(proportionnel, intégral et dérivé). Toutefois, une augmentation des
rapports de réduction entraîne une perte de rendement et un
surdimensionnement des moteurs.
+
Commande
en effort
+
transformation
inverse
Efforts
mesurés
Pour des motorisations avec de faibles rapports de réduction ou
même « à entraînement direct » (direct-drive ), les moteurs doivent
compenser les variations des forces d’inertie et de gravité fonctions de la configuration, et des commandes non linéaires sont
alors intéressantes pour assurer des performances constantes
dans toutes les conditions de fonctionnement. Une autre possibilité est d’utiliser un mode de commande robuste, par exemple
les systèmes dits « à structure variable », mais les rapidités de
réponse correspondantes sont médiocres en général. Une
« commande dynamique » est un asservissement non linéaire dont
les paramètres utilisent un modèle de la dynamique du robot.
Transformation
de coordonnées
Figure 17 – Commande hybride position-force
4.5.2 Commande d’impédance
Ce type de commande généralise le précédent. On peut choisir
d’avoir par exemple un comportement du type ressort plus amortisseur, ce qui correspond à la relation :
F n = K p ( X d – X ) + K v ( Ẋ d – Ẋ )
d’où le vecteur de commande des efforts articulaires :
T
G = J K ( X – X ) + K ( Ẋ d – Ẋ )
p
d
v
5.1 Modèles théoriques de la dynamique
(54)
(55)
Les deux principaux formalismes utilisés pour obtenir les équations différentielles qui décrivent le comportement d’un mécanisme à plusieurs corps articulés sont le formalisme de Newton
(théorèmes généraux de la mécanique classique) et celui de
Lagrange.
qui fait bien intervenir la matrice jacobienne.
Le schéma théorique est représenté sur la figure 16.
4.6 Commande hybride position-force
La commande hybride (ou mixte) consiste à contrôler simultanément les efforts dans certaines directions de l’espace, et les
mouvements dans les autres. Elle est utilisée pour des opérations au contact, comme l’ébavurage de pièces, l’assemblage, etc.
S 7 730 − 14
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
5.1.1 Équations de Newton
Soit G i le vecteur définissant la position du centre d’inertie Gi du
corps i dans un repère fixe, I i le tenseur d’inertie central (au centre
d’inertie) de ce corps, et mi sa masse, V i le vecteur vitesse angulaire instantanée de ce corps, { ( Fi ) ext , ( M i ) ext } le torseur résultant
(force et moment) en Gi des forces extérieures à ce corps considéré
isolément.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
________________________________________________________________________________ MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
Les équations fondamentales de la dynamique s’écrivent :
˙
d
---- dt- m i G i = ( F i ) ext
d
˙
------ I i • Vi = Ii • V i + V i ∧ I i • Vi = (M i ) ext
t
d
(57)
(58)
En l’absence de forces provenant de l’environnement, les forces
agissant sur ce corps sont celles au niveau de ses articulations
avec les autres corps de la structure mécanique. Au point Oi , on a
la force f et le moment m i .
i
Pour un manipulateur à structure de chaîne, en introduisant les
vecteurs :
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Li = Oi Oi + 1
d = O G
i i
i
tiwekacontentpdf_s7730 v1
Dans cette formulation des équations de la dynamique, l’effet de
la pesanteur est introduit par une accélération verticale de la base
du robot. Si le robot manipulateur est situé sur un véhicule dont le
mouvement est connu, on peut donc également introduire les
fonctions du temps correspondantes (vitesses et accélérations)
dans les premières récurrences directes qui partent de la base.
5.1.2 Équations de Lagrange
Les équations de Lagrange permettent d’obtenir directement les
relations entre les efforts moteurs aux articulations et les mouvements. Par rapport aux équations de Newton, on perd au passage
les informations sur les efforts de réaction aux articulations qui
sont utiles au dimensionnement des parties mécaniques, mais
n’interviennent pas dans un modèle utile à la commande automatique puisque les corps sont supposés indéformables.
Il s’agit de N équations différentielles non linéaires du second
ordre obtenues à partir de :
d ∂L
∂L
------ -------- – -------- = γ i
d t ∂q̇ i ∂q i
on peut écrire :
V = V
i – 1 + σi q̇i Zi
i
˙
˙
O i = O i – 1 + V i – 1 ∧ L i – 1 + σi q̇i Z i
(59)
avec
˙
˙
V i = V i – 1 + σi ( q̇˙i Z i + q̇i V i – 1 ∧ Z i )
˙˙
˙˙
˙
O i = O i – 1 + V i – 1 ∧ L i – 1 + V i – 1 ∧ (V i – 1 ∧ Li – 1 + σ i q̇i Zi )
avec
+ σi ( q̇˙i Zi + q̇ i Vi
–1
∧ Zi )
–1
∧ Zi )
˙˙
˙
= O i – 1 + Vi – 1 ∧ Li – 1 + Vi – 1 ∧ ( Vi – 1 ∧ L i – 1 )
+ σi (q̇˙i Z i + 2 q̇i Vi
σi
σi
σi
γi
« force généralisée » correspondant à la
variable articulaire qi . Elle inclut toutes les
forces non conservatives, c’est-à-dire non
seulement la force motrice ou le couple
moteur selon le cas, mais aussi les forces ou
couples de frottement.
Pour tous les systèmes mécaniques, l’énergie cinétique (44) est
une forme quadratique des vitesses :
1 T
E c = --- Q˙ A ( Q ) Q˙
2
où A (Q ) est une matrice symétrique définie positive dépendant des
masses et des inerties de chaque corps du mécanisme, et de la
configuration Q. En effet :
= 0 si l’articulation i est rotoïde,
= 1 si l’articulation i est prismatique,
= 1 – σi .
i=n
Les équations (61) et (62) s’appellent « récurrences avant », car
pour la chaîne on part de la base pour aller vers l’extrémité.
On en déduit les accélérations des centres d’inertie :
˙˙
˙˙
˙
G i = O i + Vi ∧ d i + Vi ∧ (Vi ∧ d i )
Ec =
˙
˙
∑ --2- mi Gi • Gi + --2- Vi • Ii • Vi
1
1
(67)
i=1
et on a vu que les vitesses de translation et de rotation de chaque
corps sont des fonctions linéaires des vitesses articulaires.
(63)
d’où le vecteur résultant des forces extérieures en ce point en utilisant la première équation de Newton (57).
Le moment résultant s’obtient à partir de la seconde équation de
Newton (58), connaissant les vitesses angulaires (59) et (60) et
leurs dérivées (61) et (62).
On en déduit les efforts aux articulations par des récurrences
« arrière » (en partant de l’extrémité pour revenir vers la base) :
f = (F ) + f
i+1
i ext
i
m i = (M i ) ext + m i + 1 + L i ∧ f i + 1 + d i ∧ (F i ) ext
(66)
fonction de Lagrange, différence entre
l’énergie cinétique Ec et l’énergie potentielle
Ep du mécanisme,
(61)
(62)
i = 1, ...N
L = Ec – Ep
(60)
d’où, par dérivation :
avec
(64)
D’autre part, l’énergie potentielle est fonction de la configuration
du mécanisme (potentiel de gravité, énergie dans des ressorts
compensateurs) :
E p = E p (Q )
(68)
Il en résulte que les équations de Lagrange peuvent s’écrire :
A ( Q ) Q̇˙ + B ( Q, Q̇ ) + C ( Q ) = G
(69)
où le premier vecteur représente les forces ou couples d’inertie sur
les articulations motorisées, le deuxième (du second degré par rapport aux vitesses) correspond aux effets centrifuges et de Coriolis,
le troisième traduit les efforts dus à la pesanteur et aux ressorts.
(65)
Ces équations peuvent être étendues sans trop de difficultés aux
structures arborescentes, il suffit de considérer tous les « successeurs » de chaque corps i (multiplication des points tels que Oi + 1
et des efforts transmis aux articulations). Pour les structures présentant des boucles et pour les robots parallèles, il suffit d’ouvrir
fictivement les boucles, les équations s’appliquent puisque chaque
corps est considéré comme isolé et qu’il y a autant d’inconnues
que d’équations (pour une topologie correcte et hors singularités).
5.2 Commande dynamique
La matrice A (Q ) n’est généralement pas diagonale (il y a des
couplages inertiels entre corps) et dépend fortement de la configuration Q. De plus, aux grandes vitesses, les forces centrifuges et de
Coriolis [vecteur B (Q )] peuvent être importantes. Pour ces raisons,
l’utilisation d’asservissements linéaires classiques contrôlant sépa-
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
S 7 730 − 15
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
MODÉLISATION ET COMMANDE DES ROBOTS MANIPULATEURS
________________________________________________________________________________
Pour un modèle parfait, l’évolution du vecteur des erreurs articulaires ε = (Qd – Q ) est régie par l’équation :
•
–
Qd
••
ε•
+
ε̇˙ + Kv ε̇ + K p ε = 0
Kv
ε
Q
Modèle
+
Qd
+
•
+
Qd
Robot
Q
+
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
tiwekacontentpdf_s7730 v1
•
5.2.2 Commande avec prédicteur
–
–
ε•
+
Si le modèle est très imparfait et si les erreurs initiales sont
importantes, le comportement non linéaire des erreurs (vecteur ε )
correspondant à la méthode précédente est difficilement prévisible. Bien que l’on puisse théoriquement assurer la stabilité, on
risque d’avoir des dépassements non souhaités, susceptibles de
provoquer des collisions entre le robot et son environnement. Pour
éviter cela, au lieu d’utiliser le modèle dynamique calculé à partir
de l’état mesuré du robot (positions et vitesses articulaires), on utilise celui calculé à partir de l’état désiré. On évite ainsi un rebouclage non linéaire. Les efforts au niveau des articulations sont alors
calculés par :
˙˙ ] + B ( Q ,Q˙ ) + C ( Q ) (72)
G = A ( Q ) [ K ( Q – Q ) + K ( Q˙ – Q˙ ) + Q
Kv
m
••
•
+
Qd
+
ε
Qd
+
Q
Modèle
+
Robot
Q
Figure 19 – Commande dynamique calculée à partir de la consigne
rément chaque axe conduit à des performances de rapidité et de
précision inconstantes et difficiles à estimer étant donné le caractère fortement non linéaire du processus commandé. Cet inconvénient peut être notablement réduit par des schémas de commande
automatique utilisant le modèle dynamique du mécanisme. Deux
méthodes sont exposées ici.
5.2.1 Commande théorique :
méthode des couples calculés
Ce schéma de commande, représenté sur la figure 18, utilise
une loi non linéaire pour découpler et linéariser les équations différentielles qui décrivent les mouvements articulaires. Les couples
et forces de commande sont calculés à partir du modèle
dynamique :
˙˙ ] + B (Q , Q˙ ) + C ( Q ) (70)
G = A m ( Q ) [ K p ( Q d – Q ) + K v ( Q˙ d – Q˙ ) + Q
d
m
m
avec Qd = Qd (t ) évolution du vecteur de consigne (valeurs désirées) des asservissements articulaires, m indice indiquant que A, B
et C sont estimés (modèles).
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
d
p
d
v
d
d
m
d
d
m
d
qui correspond au schéma de la figure 19.
Pour un modèle parfait et des erreurs initiales petites, on
retrouve la réponse de la commande théorique. En outre, quand
les mouvements désirés sont connus à l’avance, les termes correcteurs peuvent être précalculés hors ligne.
Kp
–
S 7 730 − 16
En choisissant alors les matrices K p et K v diagonales, les erreurs
articulaires sont découplées et chacune se comporte comme un
système du second ordre dont on peut fixer la rapidité de réponse
(choix de K p ) et l’amortissement (choix de Kv , étant donné K p ).
Kp
Figure 18 – Commande dynamique théorique
Qd
(71)
La commande dynamique est expérimentée depuis longtemps dans les laboratoires de recherche. Il n’y a que peu de
temps qu’elle est implantée dans les armoires de commande de
certains robots industriels, grâce notamment aux performances
accrues des circuits électroniques pour les calculs numériques.
6. Conclusion
Les principes de modélisation des robots manipulateurs dont cet
article a donné les grandes lignes sont utilisés dans les armoires
de commande des robots industriels modernes, y compris la
commande en effort et la commande dynamique. Les modèles
sont par ailleurs engendrés automatiquement par un grand
nombre de systèmes de conception et de fabrication assistées par
ordinateur (CFAO) utilisés pour simuler le comportement de mécanismes complexes ou pour programmer « hors ligne » les robots
industriels. Les déformations des corps constituant les mécanismes ont été toutefois négligées ici et des modèles plus compliqués seraient nécessaires pour les inclure. Les lois de commande
de robots « souples » seraient également plus compliquées car
elles devraient contrôler les déformations qui constituent autant de
degrés de liberté supplémentaires. Pour l’instant, de tels manipulateurs ne sont pas utilisés dans l’industrie, mais comme bras
téléopérés dans les navettes spatiales par exemple. Il ne faut toutefois pas exclure que de nouvelles structures se développent,
comme c’est certainement le cas avec les robots parallèles, pour
augmenter la rapidité des mouvements avec des bras relativement
légers et peu coûteux.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
P
O
U
R
Modélisation et commande
des robots manipulateurs
E
N
par
Alain LIÉGEOIS
Parution : juin 2000 - Dernière validation : février 2015 - Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Professeur de l’université Montpellier-II, Institut des sciences de l’ingénieur
Enseignant-chercheur au Laboratoire d’informatique, de robotique
et de microélectronique de Montpellier (LIRMM)
tiwekacontentpdf_s7730 v1
Bibliographie
Références
[1]
[2]
[3]
LIÉGEOIS (A.). – Les Robots. Tome 7. Analyse
des performances et CAO. 248 p. 1984
Hermès.
DOMBRE (E.) et KHALIL (W.). – Modélisation
et commande des robots. 407 p. 2e édition
1998 Hermès.
MERLET (J.-P.). – Les robots parallèles. 304 p.
1990 Hermès.
[6]
Dans les Techniques de l’Ingénieur
[4]
[5]
CLAVEL (R.). – Robots parallèles. R 7 710,
traité Informatique industrielle, 1994.
DOMBRE (E.). – Programmation des robots.
R 7 720, traité Informatique industrielle,
1998.
QUINET (J.-F.). – Évaluation des performances des robots industriels. R 7 800, traité
Informatique industrielle, 1996.
COIFFET (P.). – Réalité virtuelle : application à la
robotique. R 7 734, traité Informatique industrielle, 1996.
Normalisation
Norme internationale (ISO)
ISO 8373
1994-12-01
Robots manipulateurs industriels. Présentation des caractéristiques.
NF EN 775
5-1993
Robots manipulateurs industriels. Sécurité.
NF EN 29283
3-1993
Robots manipulateurs industriels. Critères
de performances et méthodes d’essai correspondantes.
Manipulating industrial robots-Vocabulary.
Normes françaises (AFNOR)
NF EN 29787/ISO 9787 11-1992
NF EN 29946/ISO 9946 11-1992
Robots manipulateurs industriels. Systèmes de coordonnées et mouvements.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie
est strictement interdite. − © Techniques de l’Ingénieur, traité Informatique industrielle
Ce document a ete delivre pour le compte de 7200045072 - imt mines albi // 193.50.45.187
Doc. S 7 730 − 1
S
A
V
O
I
R
P
L
U
S
GAGNEZ DU TEMPS ET SÉCURISEZ VOS PROJETS
EN UTILISANT UNE SOURCE ACTUALISÉE ET FIABLE
Techniques de l’Ingénieur propose la plus importante
collection documentaire technique et scientifique
en français !
Grâce à vos droits d’accès, retrouvez l’ensemble
des articles et fiches pratiques de votre offre,
leurs compléments et mises à jour,
et bénéficiez des services inclus.
RÉDIGÉE ET VALIDÉE
PAR DES EXPERTS
MISE À JOUR
PERMANENTE
100 % COMPATIBLE
SUR TOUS SUPPORTS
NUMÉRIQUES
SERVICES INCLUS
DANS CHAQUE OFFRE
+ de 350 000 utilisateurs
+ de 10 000 articles de référence
+ de 80 offres
15 domaines d’expertise
Automatique - Robotique
Biomédical - Pharma
Construction et travaux publics
Électronique - Photonique
Énergies
Environnement - Sécurité
Génie industriel
Ingénierie des transports
Innovation
Matériaux
Mécanique
Mesures - Analyses
Procédés chimie - Bio - Agro
Sciences fondamentales
Technologies de l’information
Pour des offres toujours plus adaptées à votre métier,
découvrez les offres dédiées à votre secteur d’activité
Depuis plus de 70 ans, Techniques de l’Ingénieur est la source
d’informations de référence des bureaux d’études,
de la R&D et de l’innovation.
www.techniques-ingenieur.fr
CONTACT : Tél. : + 33 (0)1 53 35 20 20 - Fax : +33 (0)1 53 26 79 18 - E-mail : infos.clients@teching.com
SERVICES ET OUTILS PRATIQUES
ACCÈS
LES AVANTAGES ET SERVICES
compris dans les offres Techniques de l’Ingénieur
Accès illimité
aux articles en HTML
Téléchargement des articles
au format PDF
Consultation sur tous
les supports numériques
Enrichis et mis à jour pendant
toute la durée de la souscription
Pour un usage en toute liberté
Des contenus optimisés
pour ordinateurs, tablettes et mobiles
Questions aux experts*
Articles Découverte
Dictionnaire technique multilingue
Les meilleurs experts techniques
et scientifiques vous répondent
La possibilité de consulter des articles
en dehors de votre offre
45 000 termes en français, anglais,
espagnol et allemand
Archives
Impression à la demande
Alertes actualisations
Technologies anciennes et versions
antérieures des articles
Commandez les éditions papier
de vos ressources documentaires
Recevez par email toutes les nouveautés
de vos ressources documentaires
*Questions aux experts est un service réservé aux entreprises, non proposé dans les offres écoles, universités ou pour tout autre organisme de formation.
ILS NOUS FONT CONFIANCE
www.techniques-ingenieur.fr
CONTACT : Tél. : + 33 (0)1 53 35 20 20 - Fax : +33 (0)1 53 26 79 18 - E-mail : infos.clients@teching.com