4. LEVAS
Anuncio

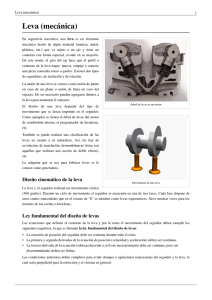
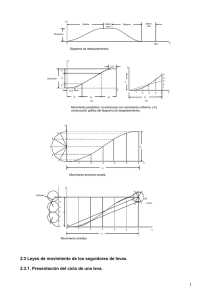
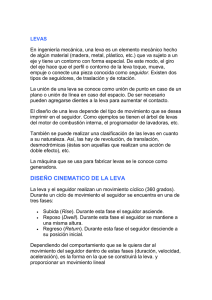
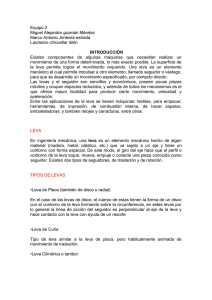
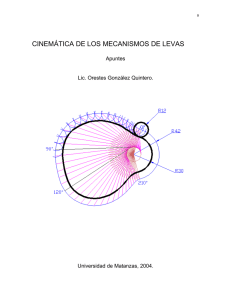
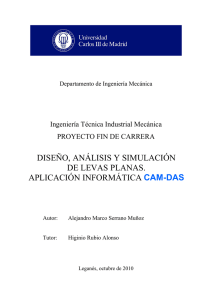
4. LEVAS 4.1. Introducción Las levas son un tipo de par de cinemático en el que el contacto entre los dos elementos se produce en único punto (o línea en tres dimensiones). Es habitual llamar leva al elemento conductor y seguidor al elemento conducido. En esta definición general se engloban los engranajes, que pueden verse como un tipo de levas especial en el que la relación de velocidades es constante. Las levas se presentan en una gran variedad de formas, y pueden ser planas o tridimensionales aunque en este tema nos restringiremos al caso plano. La Figura 4.1 muestra una leva de traslación, la Figura 4.2 una leva cilíndrica y la Figura 4.3 una leva de disco, que son las más comunes. En este Capítulo nos centraremos en la leva de disco, aunque muchas de las cuestiones que veremos se pueden generalizar sin dificultad a otros tipos de levas. Figura 4.1. Leva de traslación plana. Figura 4.2. Leva cilíndrica. Figura 4.4. Seguidor puntual centrado Figura 4.3. Leva de disco. Figura 4.5. Seguidor de pie plano © Alejo Avello, Tecnun (Universidad de Navarra). 102 Cap. 4: Levas Figura 4.6. Seguidor oscilante curvo Figura 4.7. Seguidor de rodillo descentrado El seguidor puede ser de traslación, si su movimiento es una traslación a lo largo de un eje, u oscilante, si es una rotación alrededor de un eje. Atendiendo a la forma del seguidor, éste puede ser puntual, plano, curvo o de rodillo. Los seguidores de traslación pueden ser centrados o descentrados, dependiendo de si el eje del seguidor pasa por el centro de la leva o no. La Figura 4.4 y siguientes muestran distintos tipos de seguidores. Seguidor Angulo de presión Curva primitiva Circunferencia base Circunferencia de desplazamiento Superficie de leva Desplazamiento Figura 4.8. Nomenclatura de las levas. En la Figura 4.8 se muestra, utilizando como ejemplo una leva de disco con seguidor desplazado de rodillo, la nomenclatura más comúnmente empleada en las levas. El ángulo de presión es el ángulo que forma el eje del seguidor con la normal al perfil de leva. Prescindiendo del rozamiento, la reacción entre la leva y el seguidor lleva la dirección de la normal a la leva, por lo que el ángulo de presión indica el ángulo con © Alejo Avello, Tecnun (Universidad de Navarra). Cap. 4: Levas 103 que los esfuerzos se transmiten respecto al eje del seguidor. Interesa que el este ángulo sea pequeño, puesto que cuanto mayor sea, mayores serán los esfuerzos sobre el seguidor y las guías. La curva primitiva es paralela a la superficie de la leva; coincide con la que tendría la leva si el seguidor fuese puntual, con el extremo en el centro del rodillo. La circunferencia de desplazamientos es la circunferencia con centro en el centro de la leva y que es tangente al eje del seguidor. Se denomina desplazamiento al radio de dicha circunferencia. La circunferencia base es aquélla que tiene como centro el centro de leva, y que pasa por el centro del rodillo en la posición inicial o de reposo del seguidor. El objetivo de este Capítulo es describir brevemente cómo se diseñan las levas para generar cualquier movimiento del seguidor que se desee, por métodos tanto gráficos como analíticos. Como se verá, el diseño de las levas es relativamente sencillo. Esta sencillez contrasta con la dificultad del diseño de los mecanismos de barras articuladas, que son bastante sencillos de analizar pero mucho más difíciles de diseñar para lograr un movimiento deseado. 4.2. Mecanismos de contacto directo En las levas, el movimiento se transmite por contacto directo entre dos superficies, que permanecen tangentes entre sí constantemente. Para calcular la relación de velocidades angulares entre dos perfiles tangentes nos apoyaremos en la Figura 4.9. En el punto de contacto S consideraremos dos partículas S1 y S2 , una perteneciente a cada perfil. Para que los dos perfiles permanezcan tangentes entre sí en todo momento es necesario que la componente de la velocidad de los puntos S1 y S2 en la dirección n (normal a los perfiles) sea la misma, pues en caso contrario los perfiles se separarían. Definimos un punto P en la intersección entre la recta n y la línea O1O2 . Asimismo, consideramos dos puntos P1 y P2 coincidentes con P pero que se mueven solidariamente unidos a los perfiles 1 y 2, respectivamente. Puesto que el punto P1 se mueve como si formara parte del perfil 1, podemos aplicar la ecuación del campo de velocidades del sólido rígido a los puntos P1 y S1 , lo que nos da: vS1 = v P1 + vS1P1 (4.1) Y análogamente para los puntos P2 y S2 , vS2 = v P2 + vS2 P2 (4.2) Como hemos dicho, las velocidades de los puntos S1 y S2 proyectadas sobre la recta normal es igual, por lo que podemos escribir ( vS ) = ( vS ) n 1 n (4.3) 2 Sustituyendo las ecuaciones (4.1) y (4.2) y teniendo en cuenta que tanto vS1P1 como vS2 P2 llevan la dirección de la tangente, podemos escribir la ecuación (4.3) como © Alejo Avello, Tecnun (Universidad de Navarra). 104 Cap. 4: Levas ( vP ) = ( vP ) n n 1 (4.4) 2 Puesto que el perfil tiene un movimiento de rotación con respecto al punto O1 , la velocidad de P1 es ω1 O1 P . Análogamente, la velocidad de P2 es ω2 O2 P , de manera que la ecuación (4.4) conduce a la relación ω1 O2 P = ω2 O1 P (4.5) de donde se concluye que la relación de velocidades angulares es proporcional a los segmentos que la línea normal intercepta sobre la línea de centros. 1 t n 2 S ω2 ω1 O1 P O2 Figura 4.9. Mecanismos de contacto directo. Una forma, quizá más fácil, de deducir el mismo resultado es observar que el punto P es el polo del movimiento relativo entre los elementos 1 y 2. Para probarlo, recordemos que el teorema de los tres centros establece que el polo P12 está alineado con P01 y P02 , que son, respectivamente, los puntos O1 y O2 . Por tanto, P12 debe estar en la recta O1O2 . Por otra parte, la velocidad relativa entre los dos perfiles debe ser tangente a los mismos en el punto de contacto, por lo que el polo debe estar sobre la recta normal. La intersección de ambas rectas da el polo del movimiento relativo entre los elementos 1 y 2 que es, precisamente, el punto P . Finalmente, basta con imponer la condición de que la velocidad del punto P como perteciente a 1 es igual a su velocidad como perteneciente a 2, para obtener la ecuación (4.5). 4.3. Diagramas de desplazamiento La función de una leva es producir un determinado desplazamiento en el seguidor para un valor dado de la posición de la leva. Llamaremos θ al ángulo girado por la leva e y al desplazamiento del seguidor. La leva se diseñará de manera que la función y = f ( θ) (4.6) se satisfaga. A la gráfica de y frente a θ se le denomina diagrama de desplazamiento. De la función de desplazamiento podemos obtener la velocidad y aceleración del seguidor por medio de las expresiones © Alejo Avello, Tecnun (Universidad de Navarra).