Vamos a aplicar transformada de Laplace a cada una de las dos
Anuncio

GUIA 5 – TRANSFORMADA DE LAPLACE
Ejercicio 19
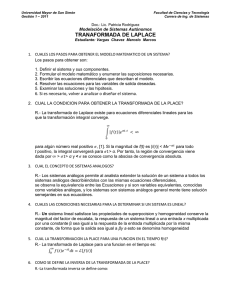
Dado el siguiente circuito, que se representa mediante el sistema de ecuaciones
diferenciales mostrado, aplique la transformada de Laplace para encontrar la tensión en
la resistencia R, vr(t), en función de las tensiones genéricas causales v1(t) y v2(2).
L
v1(t)
L
i2(t)
i1(t)
v2(t)
R
Vamos a aplicar transformada de Laplace a cada una de las dos ecuaciones anteriores:
𝑉1 (𝑠) = 𝐿(𝑠𝐼1 (𝑠) − 𝑖1 (0)) + (𝐼1 (𝑠) + 𝐼2 (𝑠))𝑅
{
𝑉2 (𝑠) = 𝐿(𝑠𝐼2 (𝑠) − 𝑖2 (0)) + (𝐼1 (𝑠) + 𝐼2 (𝑠))𝑅
Como queremos hallar vr(t) = L-1{VR(s)} y VR(s) = (𝐼1 (𝑠) + 𝐼2 (𝑠))𝑅, despejamos del
sistema anterior 𝐼1 (𝑠) + 𝐼2 (𝑠), teniendo en cuenta además que según las condiciones
iniciales dadas es i1 (0) i2 (0) 0 . Para hacerlo sumamos ambas ecuaciones:
𝑉1 (𝑠) + 𝑉2 (𝑠) = 𝐿𝑠(𝐼1 (𝑠) + 𝐼2 (𝑠)) + 2(𝐼1 (𝑠) + 𝐼2 (𝑠))𝑅
𝑉1 (𝑠) + 𝑉2 (𝑠) = (𝐿𝑠 + 2𝑅)(𝐼1 (𝑠) + 𝐼2 (𝑠))
𝑉1 (𝑠) + 𝑉2 (𝑠)
𝐼1 (𝑠) + 𝐼2 (𝑠) =
(𝐿𝑠 + 2𝑅)
Y por lo tanto
𝑉1 (𝑠) + 𝑉2 (𝑠)
.𝑅
(𝐿𝑠 + 2𝑅)
Reescribimos esta ecuación para poder antitransformar usando la tabla.
𝑉𝑅 (𝑠) =
𝑉𝑅 (𝑠) =
𝑅
. (𝑉 (𝑠) + 𝑉2 (𝑠))
(𝐿𝑠 + 2𝑅) 1
Vemos en la tabla que:
𝑡
−1 {𝐹(𝑠)𝐺(𝑠)}
𝐿
= ∫ 𝑓(𝑣)𝑔(𝑣 − 𝑡)𝑑𝑣
0
𝑅
𝑅/𝐿
Si llamamos 𝐹(𝑠) = (𝑉1 (𝑠) + 𝑉2 (𝑠)) y 𝐺(𝑠) = (𝐿𝑠+2𝑅) = 𝑠+2𝑅/𝐿
𝑅/𝐿
𝑅
𝑅
Nos queda 𝑔(𝑡) = 𝐿−1 {𝑠+2𝑅/𝐿} = 𝐿 𝑒 −2 𝐿 𝑡 y 𝑓(𝑡) = 𝐿−1 {𝑉1 (𝑠) + 𝑉2 (𝑠)} = 𝑣1 (𝑡) + 𝑣2 (𝑡)
Por lo tanto:
𝑡
𝑡
𝑅
𝑅
(𝑡−𝑣)
𝑣𝑟 (𝑡) = ∫ 𝑓(𝑣)𝑔(𝑣 − 𝑡)𝑑𝑣 = ∫ (𝑣1 (𝑣) + 𝑣2 (𝑣)). 𝑒 −2 𝐿
𝑑𝑣 =
𝐿
0
0
𝑅
𝑅 −2𝑅𝑡 𝑡
𝑣𝑟 (𝑡) = 𝑒 𝐿 ∫ (𝑣1 (𝑣) + 𝑣2 (𝑣)). 𝑒 2 𝐿 𝑣 𝑑𝑣
𝐿
0
Ejercicio 22:
Dado el siguiente sistema:
X(s)
Y(s)
1/k
s
7
s
s
a) Encuentre los valores de k para los cuales el sistema es estable.
Luego, suponiendo que k = 10:
b) Halle la respuesta al impulso.
c) Obtenga la ecuación diferencial que modela al sistema.
d) Calcule y(t) cuando x(t ) 2 e 4t u s (t ) sabiendo que y (0) 2 y (0) 4 . Distinga
la solución libre de la solución forzada.
e) Muestre que la solución forzada tiene valor inicial nulo (se calcula con
condiciones iniciales nulas).
a) Del diagrama en bloques podemos deducir que la salida del sumador es k.Y(s)
Y las señales que ingresan al mismo son X(s), sX(s), s2Y(s), 7sY(s).
Por lo tanto la ecuación del sumador es:
k.Y(s) = X(s) + sX(s) - s2Y(s) - 7sY(s)
Agrupando términos
Y(s) ( s2 + 7s + k ) = X(s) (1 + s)
De donde:
𝐻(𝑠) =
𝑠2
1+𝑠
+ 7𝑠 + 𝑘
Para que el sistema sea estable los polos de H(s) deben tener parte real negativa.
Utilizamos la fórmula resolvente para calcular los polos de H(s):
𝑠=
−7 ± √72 − 4𝑘
2
Para que el sistema sea estable los polos pueden ser ambos reales negativos, lo cual
sucede si el radicando es mayor o igual que cero y el resultado de la raíz menor que
7, o no reales con parte real negativa, lo cual sucede si el radicando es negativo, ya
que en ese caso la parte real será -7/2. Por lo tanto:
72 − 4𝑘 ≥ 0 𝑦 √72 − 4𝑘 < 7
49
𝑘≤
𝑦 𝑘>0
4
ó
ó
72 − 4𝑘 < 0
49
𝑘>
4
De ambas condiciones se deduce que el sistema es estable si k > 0.
b) Para k = 10 queda:
𝐻(𝑠) =
𝑠2
1+𝑠
+ 7𝑠 + 10
h(t) = L-1{H(s)}
Un método para antitransformar H(s) es separarla en fracciones simples. Las raíces
del denominador de H(s) son -2 y -5. Por lo tanto:
𝐻(𝑠) =
1+𝑠
𝐴
𝐵
𝐴(𝑠 + 5) + 𝐵(𝑠 + 2)
=
+
=
(𝑠 + 2)(𝑠 + 5) 𝑠 + 2 𝑠 + 5
(𝑠 + 2)(𝑠 + 5)
De donde A (s + 5) + B (s + 5) = s + 1
Reemplazando en la expresión de H(s)
𝐻(𝑠) =
y es A = -1/3 y B = 4/3
−1/3 4/3
+
𝑠+2 𝑠+5
1
En la tabla vemos que 𝐿−1 {𝑠−𝑎} = 𝑒 𝑎𝑡 por lo tanto:
ℎ(𝑡) = 𝐿−1 {
−1/3
4/3
1
4
+
} = (− 𝑒 −2𝑡 + 𝑒 −5𝑡 ) . 𝑢𝑠 (𝑡)
𝑠+2 𝑠+5
3
3
Donde hemos agregado us(t) por la condición de causalidad de la transformada de
Laplace.
c) A partir de la expresión H(s) = Y(s) / X(s) es posible encontrar la ecuación
diferencial.
𝑌(𝑠)
1+𝑠
= 2
→ (𝑠 2 + 7𝑠 + 10)𝑌(𝑠) = (𝑠 + 1)𝑋(𝑠) →
𝑋(𝑠) 𝑠 + 7𝑠 + 10
→ 𝑠 2 𝑌(𝑠) + 7𝑠𝑌(𝑠) + 10𝑌(𝑠) = 𝑠𝑋(𝑠) + 𝑋(𝑠)
Antitransformando miembro a miembro y teniendo en cuenta que H(s) se calcula
con condiciones iniciales nulas, nos queda:
𝑦 ′′ (𝑡) + 7𝑦 ′ (𝑡) + 10𝑦(𝑡) = 𝑥 ′ (𝑡) + 𝑥(𝑡)
d) Existen muchas formas diferentes para hallar y(t) para una x(t) y condiciones
iniciales dadas.
Vamos a hacerlo en esta oportunidad usando transformada de Laplace en la
ecuación diferencial obtenida anteriormente.
𝑠 2 𝑌(𝑠) − 𝑠𝑦(0) − 𝑦′(0) + 7(𝑠𝑌(𝑠) − 𝑦(0)) + 10𝑌(𝑠) = 𝑠𝑋(𝑠) − 𝑥(0) + 𝑋(𝑠)
En nuestro caso es y (0) 2 y (0) 4 , X(s) = L{2.e-4t} = 2 / (s + 4) y x(0) = 2
𝑠 2 𝑌(𝑠) − 2𝑠 + 4 + 7(𝑠𝑌(𝑠) − 2) + 10𝑌(𝑠) = 𝑠𝑋(𝑠) − 2 + 𝑋(𝑠)
(𝑠 2 + 7𝑠 + 10)𝑌(𝑠) − 2𝑠 − 10 = (𝑠 + 1)𝑋(𝑠) − 2
(𝑠 2 + 7𝑠 + 10)𝑌(𝑠) = (𝑠 + 1)𝑋(𝑠) + 2𝑠 + 8
𝑌(𝑠) =
(𝑠 + 1)𝑋(𝑠)
2𝑠 + 8
+ 2
2
𝑠 + 7𝑠 + 10 𝑠 + 7𝑠 + 10
El primer término de esta expresión depende de la entrada y su antitransformada nos
dará la respuesta forzada (respuesta a la entrada con condiciones iniciales nulas),
mientras que el segundo depende sólo de las condiciones iniciales y su
antitransformada no dará la respuesta libre del sistema (respuesta a las condiciones
iniciales).
Antes de antitransformar reemplazamos X(s) y factorizamos los denominadores en
la expresión de Y(s):
𝑌(𝑠) =
2(𝑠 + 1)
2𝑠 + 8
+
(𝑠 + 2)(𝑠 + 5)(𝑠 + 4) (𝑠 + 2)(𝑠 + 5)
Antitransformamos cada término separando en fracciones simples:
2(𝑠 + 1)
𝐴
𝐵
𝐶
} = 𝐿−1 {
+
+
}
(𝑠 + 2)(𝑠 + 5)(𝑠 + 4)
𝑠+2 𝑠+5 𝑠+4
−1/3 −8/3
3
= 𝐿−1 {
+
+
}
𝑠+2 𝑠+5 𝑠+5
1
8
= (− 𝑒 −2𝑡 − 𝑒 −5𝑡 + 3𝑒 −5𝑡 ) . 𝑢𝑠 (𝑡)
3
3
𝑦𝑓 = 𝐿−1 {
2𝑠 + 8
𝐴
𝐵
4/3
2/3
} = 𝐿−1 {
+
} = 𝐿−1 {
+
}
(𝑠 + 2)(𝑠 + 5)
𝑠+2 𝑠+5
𝑠+2 𝑠+5
4
2
= ( 𝑒 −2𝑡 + 𝑒 −5𝑡 ) . 𝑢𝑠 (𝑡)
3
3
𝑦𝑙 = 𝐿−1 {
La solución total es 𝑦(𝑡) = (𝑒 −2𝑡 − 2𝑒 −5𝑡 + 3𝑒 −5𝑡 ). 𝑢𝑠 (𝑡)
1
8
e) 𝑦𝑓 (0) = − 3 𝑒 0 − 3 𝑒 0 + 3𝑒 0 = 0
GUIA DE TRABAJOS PRÁCTICOS Nº5 - RESOLUCION DE VARIABLE DE ESTADO EN
EL DOMINIO TRANSFORMADO
Ejercicio 26
Considere el sistema descrito por las siguientes ecuaciones de estado:
x1 2 0 x1 1
x 1 1 x 1ut
2
2
a)
b)
c)
d)
x
yt 3 1 1
x2
Encuentre la transformada de Laplace de la matriz de transición, (s).
Halle la matriz de transición, (t)=eAt.
Encuentre la función de transferencia.
A partir del modelo en variables de estado halle un diagrama en bloques utilizando
bloques del tipo 1/s.
e) Si las condiciones iniciales del sistema son y(0 ) 1 e y ( 0 ) 1 y no hay entrada
aplicada, obtenga las correspondientes condiciones iniciales para las variables de
estado, x1(0-) y x2(0-).
f) Con las condiciones iniciales halladas en d) calcule la respuesta no forzada (libre) de los
estados, x(t). Grafique las respuestas y verifique las condiciones iniciales.
g) Halle la respuesta no forzada (libre) del sistema, y(t). Grafique la respuesta y verifique
la condición inicial.
h) Halle la respuesta total si la entrada es u(t ) 10sen(t ) us(t ) con las condiciones iniciales
del inciso c). Utilice la respuesta calculada antes.
i) Calcule los autovalores y los autovectores de la matriz de estados. A partir de lo
calculado analice la estabilidad del sistema justificando su análisis.
j) Proponga una matriz de transformación P tal que la matriz de estados del nuevo sistema
sea diagonal.
k) Halle la matriz de estados y la matriz de transición de los estados del nuevo modelo.
¿Cómo será su función de transferencia?
Resolución
a)
Recordemos la expresión para la transformada de Laplace de la matriz de
transición, Φ(s)= (sI-A)-1, recordando que I es la matriz identidad del orden del
sistema o número de variables de estado definidas (en este caso, 2) y la matriz
A surge de la información dada en las ecuaciones de estado, cuya forma general
en el tiempo está dada en (1) que como ya saben puede llevarse al dominio de
la transformada de Laplace de acuerdo a (2)
x(t ) Ax(t ) Bu (t )
y(t ) Cx(t ) Du(t )
sX (s) AX (s) BU (s)
(1)
Y (s) CX (s) DU (s)
(2)
Luego resulta que:
1 0 2 0
0 1 1 1
1
(s) s
s 0 2 0
0 s 1 1
1
s 2 0
1 s 1
1
T
s 1 1
1
0
s2
s 2
1
( s 1)( s 2)
( s 1)( s 2)
0
1
s 1
b) Para obtener ahora φ(t)=eAt debemos antitransformar el resultado hallado en
a), término por término de la matriz obtenida, de modo que si expresamos a
(s) 12(s)
(s) 11
21 (s) 22 (s)
(t )
(t ) 11
21(t )
resulta que :3
12(t )
22 (t )
(t ) L-1 ( s)
11
11
(t ) L-1 ( s)
12
donde 12
1
21 (t ) L 21 ( s)
22 (t ) L-1 22 ( s)
-1 1 e 2t u (t )
s
11 (t ) L
s 2
(t ) L-1 0 0
12
En este caso,
1
-1
-1 1 1 (e t e 2t )u (t )
L
21 (t ) L
s
s 1 s 2
( s 1)( s 2)
1
t
22 (t ) L-1
e u s (t )
s
1
c) Para calcular la llamada función transferencia H(s), aplicamos la formula
empleando lo hallado en el inciso a) H(s)=C(sI-A)-1B, donde las matrices B y C se
obtienen de los datos del problema.
1
0
s2
1
1 3
H (s) 3 1
1
1 s 2 (s 1)( s 2)
1
s 1
(s 1)( s 2)
3
1
1
4s 6
s 2 (s 1)( s 2) s 1 ( s 1)( s 2)
1 1
s 1 1
d) Para hallar un diagrama en bloque empleando bloques de tipo 1/s, existen varias
posibilidades. Teniendo el modelo en variables de estado transformado, el proceso
es muy simple:
Desarrollamos las ecuaciones dadas en forma matricial por el sistema, que van a
resultar en tantas como variables de estado tengamos más una adicional para la
salida. Es decir, del modelo transformado sabemos que:
X (s) 2 0 X 1 (s) 1
s 1
U (s)
X 2 (s) 1 1 X 2 (s) 1
X ( s)
Y s 3 1 1
X 2 ( s )
que llevado a las tres ecuaciones resulta:
sX1(s)=-2X1(s)+U(s)
sX2(s)= X1(s) – X2(s) + U(s)
Y(s)=3X1(s)+X2(s)
Luego, considerando que los miembros izquierdos de cada ecuación corresponden a
la salida de un sumador, los juntamos y obtenemos:
2
-
U(s)
X1
+
3
Y(s)
+
X2
+
-
Nota: otra alternativa que no corresponde específicamente a lo pedido en el
inciso, (para obtener otro diagrama en bloques diferente) sería apelar al H(s) (y
que recordemos, siempre es único para cada sistema).
H ( s)
Y ( s)
4s 6
, donde U(s) es la transformada de Laplace de la entrada
U (s) (s 1)( s 2)
e Y(s) es la transformada de Laplace de la salida; y por lo tanto distribuyendo
resulta:
Y ( s)( s 1)( s 2) U (s)(4s 6) s 2Y (s) 3sY (s) 2Y ( s) 4sU ( s) 6U (s)
(3)
Luego despejando de un lado el término de Y(s) que esté multiplicado por la
mayor potencia de s, llegamos a :
s 2Y (s) 4sU (s) 6U (s) 3sY (s) 2Y (s)
recordando que el miembro de la izquierda es la salida del sumador llegamos a:
4
U(s)
+
6
1/s
1/s
Y(s)
-3
-2
(se suponen todos signos positivos en el sumador)
e) Para resolver lo pedido en el inciso debemos relacionar las variables de estado con
la salida y su derivada. Para ello, usamos las ecuaciones del modelo de VE.
Veamos:
De la ecuación que relaciona la salida con las variables de estado tenemos que:
y(t)=3x1(t)+x2(t)
si derivamos esta ecuación llegamos a:
y’(t)=3x1’(t)+x2’(t)
donde debemos relacionar x1’(t) y x2’(t) con x1 e x2 a través de:
x1’(t)=-2x1(t)
x2’(t)=x1(t)-x2(t)
que son las ecuaciones restantes del modelo de VE.
Finalmente relacionando todo y especializando en t=0y(0-)=3x1(0-)+x2(0-)=1
y’(0-)=3x1’(0-)+x2’(0-)=3(2x1(0-))+(x1(0-)-x2(0-))=7x1(0-)-x2(0-)=1
de donde resulta el sistema de ecuaciones:
y1 (0) 3 1 x1 (0)
1
y (0) 7 1 x (0) 1
2
2
x1 (0) 3 1
x (0) 7 1
2
f)
1
y (0 )
y (0 )
que lleva a:
1
4
Debemos calcular la respuesta libre de los estados, esto significa la respuesta del
vector de variables de estado sin entrada para las condiciones iniciales halladas en
e). Para ello podemos
1- simplemente aplicamos la fórmula ya conocida de antes xl(t)=φ(t)x(0-)=
xl (t ) e 2t
xl (t ) (t ) x(0) 1 t
2t
xl2 (t ) e e
e 2t
0 x1 (0)
t
t
2t
e x 2 (0)
e e
0 1 e 2t
e t 4 3e t e 2t
donde cada componente del vector es la parte libre de la solución temporal de la variable
de estado correspondiente (recordando que es causal):
Los gráficos serían
4
x1libre
x2libre
3.5
3
2.5
2
1.5
1
0.5
0
-0.5
-1
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Mirando x1(0) y x2(0) se verifican las condiciones iniciales dadas.
2- La otra posibilidad es trabajando en el dominio transformado y
antitransformando, es decir:
Calculamos Xl (s) y antitransformamos ambas componentes:
1
s2
Xl1 ( s)
X l ( s) ( s) x(0)
1
Xl2 ( s)
( s 1)( s 2)
0
1
4
1
s 1
1
e 2t
s2
x
(
t
)
t
4
s
7
l
2t
3e e
( s 1)( s 2)
g) Cuando nos piden la respuesta no forzada o libre del sistema se refieren a ylibre(t) y
nuevamente hay dos formas principales de hacerlo:
1- Trabajando en el tiempo como se vio en variable de estado en el tiempo:
e 2t
xl (t )
yl (t ) Cxl (t ) C (t ) x(0) 3 1 1 3 1 t
2t
xl2 (t )
e e
e 2t
3 1 t
2t
e e
0 1
t
2t )u (t )
(3e 2e
s
e t 4
0 x1 (0)
e t x 2 (0)
De aquí podemos verificar las condiciones iniciales dadas en e)
ylibre(0)=3-2=1
y la derivada de ylibre(t) resulta y'l (t ) (3e t 4e 2t )u s (t ) que especializada en t=0
da y’libre(0)=-3+4=1
Su gráfico correspondiente es:
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
2- La otra posibilidad es nuevamente trabajar en el dominio transformado y luego
antitransformar:
Como
1
s2
Xl1( s)
Yl ( s) CX l ( s) C ( s) x(0) C
3 1
1
Xl2 ( s)
( s 1)( s 2)
0
1
4
1
s 1
3
4s 7
s4
s 2 ( s 1)( s 2) ( s`1)( s 2)
Luego antitransformamos Yl(s) expandiendo en fracciones simples:
s4
3
2
yl (t ) 3et 2e2t us (t )
(s`1)(s 2) s 1 s 2
h) Para calcular la salida total usando la calculada anteriormente, que es la libre,
debemos sumar la parte forzada. Una manera de calcular la solución forzada que ya
saben es aplicando la integral
t
t
t0
0
y f (t ) x( )h(t )d 10sen(t )h(t )d
donde deberíamos calcular la respuesta al
impulso en primer lugar
Sin embargo, es posible (y de hecho recomendable) trabajar en el dominio
transformado y luego antitransformar. Veamos esta opción:
Y f ( s) U ( s) H ( s)
10
4s 6
s 2 1 s 2 3s 2
14s 18
s2 1
10
4
s 1 s 2
donde se ha expandido en
fracciones simples,
sabiendo que cuando hay raíces complejas conjugadas la forma es
As B
s2 1
Finalmente antitransformamos cada sumando resulta
14s
18
10
4
t
2t u (t )
y f (t ) L- 1
14 cos(t ) 18sen(t ) 10e 4e
s
2
2
s
1
s
2
s 1 s 1
Y entonces
y(t ) yl (t ) y f (t ) 3et 2e2t 14 cos(t ) 18sen(t ) 10et 4e2t us (t )
14 cos(t ) 18sen(t ) 13et 2e 2t us (t )
i) Para calcular los autovalores seguimos el cálculo ya visto en el dominio temporal
1
detI A 0 ( 2)( 1) 0 1
2 2
que como tienen parte real negativa
ambos, determinan un sistema estable.
Para el cálculo de los autovectores seguimos el procedimiento ya visto:
0 v1
2
(I A)v 0
0 donde reemplazamos λ por cada autovalor
1 1 v2
hallado:
Y resulta:
1
0 v1
0
Para λ=-1:
0 v1 0 y entonces un autovector será k , k 0
1 0 v2
0
0 v1
Para λ=-2:
0 v1 v 2 0 v1 v2 y entonces un autovector será
1 1 v2
k
k , k 0
k puede ser cualquier valor no nulo, tomando por ejemplo de los infinitos posibles
0 1
k=1, los dos autovectores serán y
1 1
j) La matriz P de transformación para que el sistema transformado tenga una matriz
Av diagonal debe estar formada por columnas que correspondan a los autovectores
del A original. Si usamos los recién obtenidos tenemos que :
0 1
P
y la matriz Av diagonal será tal que en su diagonal
1 1
principal van a estar los autovalores siguiendo el orden en que fueron colocados los
autovectores en las columnas. Por ejemplo, a partir de la matriz P dada, la primera
columna está formada por el autovector correspondiente al autovalor -1 y la segunda
por el autovector de -2, luego
1 0
Av
0 2
k) Como se mencionó en el inciso anterior, la matriz de estados Av va a ser la que
tenga los autovalores en la diagonal según el orden en que se colocaron los
autovectores y es la dada anteriormente. Para el cálculo de la matriz de transición de
los estados, se aplica la propiedad de que al tratarse Av de una matriz diagonal:
et 0
e Avt
2t us (t )
0 e
Finalmente sin necesidad de efectuar cuentas podemos decir que la función
transferencia del sistema transformado va a ser la misma ya que el sistema representado es
el mismo en ambos casos (poseen ec. dif. y función de transferencia únicas)