Calibración en longitud de onda de láseres estabilizados con
Anuncio

Copia No Controlada
Instituto Nacional
de Tecnología Industrial
Centro de Desarrollo e Investigación
en Física y Metrología
Procedimiento específico: PEO02
CALIBRACIÓN EN LONGITUD
DE ONDA DE LÁSERES
ESTABILIZADOS CON UN
INTERFERÓMETRO DE MICHELSON
DE DOBLE ESPEJO MÓVIL Y EL
SISTEMA LAMBA METER LM-11
Revisión: Diciembre 2014
Este documento se ha elaborado con recursos del Instituto Nacional de Tecnología Industrial.
Sólo se permite su reproducción sin fines de lucro y haciendo referencia a la fuente.
Copia No Controlada
PEO02 Lista de enmiendas: Diciembre 2014
ENMIENDA
DESCARTAR
INSERTAR
Nº
CAPÍTULO PÁGINA PÁRRAFO
CAPÍTULO
FECHA
RECIBIDO
PÁGINA PÁRRAFO
FIRMA
1 de 1
Copia No Controlada
PEO02 Índice: Diciembre 2014
NOMBRE DEL CAPÍTULO
REVISIÓN
Página titular
Diciembre 2014
Lista de enmiendas
Diciembre 2014
Índice
Diciembre 2014
Calibración en longitud de onda de láseres estabilizados con un interferómetro de Michelson de doble
espejo móvil y el sistema LAMBA METER LM-11
Diciembre 2014
Apéndice 1
Diciembre 2014
Apéndice 2
Diciembre 2014
Apéndice 3
Diciembre 2014
Apéndice 4
Diciembre 2014
Apéndice 5
Diciembre 2014
Copia No Controlada
PEO02: Diciembre 2014
1. Objetivo
Definir el procedimiento para la calibración en longitud de onda de láseres estabilizados con un interferómetro de Michelson de doble espejo móvil y el sistema LAMBA METER LM-11.
2. Alcance
Aplicable a la calibración de láseres estabilizados continuos con longitudes de onda en el visible con
una precisión de hasta una parte en 108.
3. Definiciones y abreviaturas
LP: Láser patrón. El láser patrón es un láser de He-Ne/I2. Este instrumento es utilizado como la realización de la unidad básica de longitud.
LI: Láser incógnita o a calibrar.
MC: Manual de la Calidad del INTI - Física y Metrología.
PG: Procedimiento General del INTI - Física y Metrología.
MLM: Manual del LAMBDA METER LM-11.
4. Referencias
MLM
“Guía para la expresión de las incertidumbres de medición” ISO - BIPM - IEC - IFCC - IUPAC - IUPAP OIML. Edición 1993 (traducción al castellano hecha por el INTI - Física y Metrología)
“Interferometric real-time display of cw dye laser wavelength with sub-Doppler accuracy” J. L. Hall,
S. A. Lee, Applied Physics Letters, Vol. 29, Nº. 6, 15 Septiembre 1976.
Reporte Internacional “Mise en Pratique of the Definition of the Metre (1992)”, T. J. Quinn,
Metrologia 1993/94, 30, 523-541.
Reporte Internacional “Practical Realization of the definition of the metre (1997)” T. J. Quinn,
Metrologia, 1999, 36, 221-244.
La verificación de la vigencia de los documentos indicados se realiza previamente a la realización de
cada calibración.
5. Responsabilidades
Véase el punto 4.6 del MC.
6. Instrucciones
Detalle del procedimiento:
Se calibran láseres estabilizados, continuos con longitudes de onda en el visible o en el infrarrojo.
Se determinan los siguientes parámetros:
Valor de la longitud de onda del láser.
El montaje utilizado para la calibración está compuesto por:
1 (Un) Láser SISTEMA LASER IOD (Láser de He Ne estabilizado con celda de yodo), fabricado en Alemania en Physikalisch-Technische Bundesanstalt (PTB), modelo PMT/ HE 99 Nro: 99-01, nro. de inventario INTI 10064. Compuesto por un cabezal láser (largo: 52 cm, Ancho: 22 cm, Altura: 21cm, Peso: 18:
kg), su fuente (largo: 40 cm, Ancho: 34 cm, Altura: 27cm, Peso: 9: kg ), 7 cables de conexión y 1 cable
de AC de alimentación)
Unidad de control para el LP
Osciloscopio para el monitoreo del LP
Mesa óptica
Dos sistemas de colimación formados por dos lentes cada uno
Dos mesas micrométricas para el montaje de las lentes de colimación
5 espejos.
Divisor de Haz.
Retrorreflector montado en un carrito con sistema de inyección de aire.
1 de 10
Copia No Controlada
PEO02: Diciembre 2014
Riel de granito de un metro de largo con dos electroactuadores adosados en los extremos.
Dos detectores de silicio.
Unidad de control del Lambda Meter.
Contador Hewlett Packard 53132A del Departamento de Electrónica de INTI
Osciloscopio para la alineación fina.
Termohigrómetro. TES 1360, Serial No 95085298
Barómetro DPI 142
Sistema de medición de temperatura :Multimetro Keithley 2000 y termorresistencias 0628247
identificadas como T3 y T4
Electrónica de control para electroactuadores.
La identificación, transporte y almacenaje de los láseres se realiza de acuerdo a lo establecido al
respecto en los procedimientos Generales.
El almacenaje de los láseres se hace en el propio laboratorio de óptica (Nº 41), perteneciente a la Unidad Técnica Óptica del INTI - Física y Metrología.
La calibración se realiza según el siguiente procedimiento que se divide en tres partes: Principio de
operación, alineación y medición.
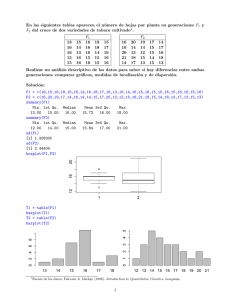
PRINCIPIO DE OPERACIÓN
El diseño interferométrico se basa en un interferómetro de tipo Michelson de doble espejo móvil (Figura 1).
El instrumento cuenta con una guía de granito de 1 m de largo aproximadamente para el traslado de
un doble espejo (retrorreflector), la electrónica que permite la propulsión del doble espejo a lo largo
del riel, 3 espejos identificados en la Figura 1 como M1, M2 y M3, el retrorreflector, un divisor de haz,
y un detector con su electrónica.
Para mejorar el contraste de franjas del patrón de interferencia que se obtiene a la salida del divisor
de haz, se colima el haz a la salida de la fuente. Esto se realiza mediante un sistema de dos lentes.
Inicialmente se procede a alinear el láser patrón (LP), para ello el haz colimado se hace incidir sobre
un divisor de haz, parte se refleja hacia el espejo M3, y parte se transmite al espejo M2. Desde M2 y M3
reflejan hacia el retrorreflector y desde éste a M2 y M3, reflejándose por último en los mismos hacia el
divisor de haz, direccionándose desde éste hacia el detector.
Sistema de
colimación
Láser Patrón, LP
M1
Detector A
Divisor de haz
M2
M3
Retrorreflector
Figura 1 : Interferómetro lambda-meter
2 de 10
Copia No Controlada
PEO02: Diciembre 2014
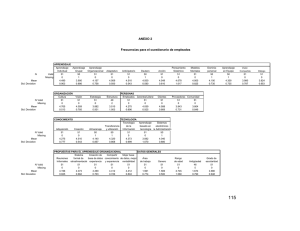
El retrorreflector se desplaza entre los espejos M2 y M3, a una velocidad del orden de 0,15 m/s. El retroreflector se encuentra colocado sobre una base metálica, que se desplaza sobre un riel de granito
(Figura 2). La base metálica posee unos pequeños orificios a través de los cuales se inyecta aire. El mecanismo de propulsión del retrorreflector se logra con dos electroactuadores, cados en ambos extremos del riel. Inicialmente se impulsa el retroreflector en forma manual sobre el colchón de aire hasta
uno de los electroactuadores, éste genera un pulso sobre el retrorreflector que viaja hasta el otro extremo, encontrando al segundo electroactuador donde recibe un nuevo pulso que lo regresa hacia el
primer electroactuador. Así el proceso se repite continuamente. De esta forma el retrorreflector viaja
de extremo a extremo de la barra, sobre un colchón de aire, por lo que lo hace prácticamente a velocidad constante.
M2
M3
retrorreflector
retrorreflector
riel
riel
Electroactuadores
Vista lateral
Vista frontal
Figura 2 Interferómetro Lambda Meter. Vista lateral y frontal del sistema retrorreflector.
El patrón de franjas que se observa sobre el detector será un patrón de franjas concéntricas o nó dependiendo de la inclinación relativa entre los espejos M2 y M3, y debido al hecho de que la fuente es
extensa y monocromática. La diferencia entre máximos consecutivos corresponde a un desplazamiento de λ/4 del retrorreflector (doble espejo). Por lo tanto la frecuencia ν
con la que se suceden los
máximos (o mínimos) de intensidad sobre el detector resulta :
ν=
v
λ
4
(1.1)
donde v es la velocidad del retrorreflector y λ la longitud de onda del haz incidente.
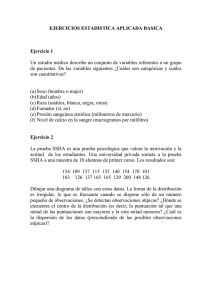
Una vez alineado el láser patrón, se agrega el segundo láser (el láser a calibrar, LI) cuyo haz colimado
se dispone en forma paralela al haz del láser patrón. Para ello se debieron incorporar dos espejos más
(M4 y M5 en la Figura 3), con sus respectivos posicionadores, así como también un detector con su correspondiente electrónica (detector B).
3 de 10
Copia No Controlada
PEO02: Diciembre 2014
Sistemas de colimación
M4
Láser Incógnita, LI
Láser Patrón, LP
M1
M5
Detector B
Detector A
Divisor de haz
M2
M3
Retrorreflector
Figura 3: Interferómetro Lambda Meter, calibración
A partir de la ecuación (1.1), y teniendo presente que la longitud recorrida, L, por ambos haces es la
misma, y que se produce en el mismo tiempo, t, resulta
o lo que es lo mismo
L = v = N r λ r 1 = N iλ i 1
t
4 t
4 t
A
λi = B λr
(1.2)
(1.3)
donde A y B representan los números de máximos consecutivos que se registran sobre los detectores A
y B respectivamente, λi la longitud de onda del LI y λr la longitud de onda del LP. La electrónica del
Lambda Meter multiplica por 100 la señal del canal A, y multiplica por dos la señal del canal B, por lo
que el cociente A/B que se lee en el frecuencímetro se debe corregir por un factor 50, es decir
1 A
λi = 50 B λr
(1.4)
en función de los índices de refracción la ecuación anterior queda:
1 A
(1.5)
λ ic = n i λ rc
50 B n r
Con λic la longitud de onda incógnita en el vacío y λrc la longitud de onda del láser patrón en el vacío.
De (1.2) resulta evidente que, salvo en el caso ideal en que el retrorreflector se desplazara a velocidad
constante, para que (1.3) resulte válida el cociente A/B se debe adquirir midiendo en forma simultánea
la señales A y B.
El detector escanea las franjas a través del registro del nivel de intensidad en forma analógica o digital. La señal analógica se utiliza como monitoreo en un osciloscopio, mientras que la señal digital se
conecta al frecuencímetro.
4 de 10
Copia No Controlada
PEO02: Diciembre 2014
ALINEACIÓN
Láser Patrón, LP
I. Sobre el divisor de haz se observa una doble imagen, lo que da origen a dos patrones de
interferencia, que pueden quedar solapados (ya que, si bien están colimados recorren un largo
camino dentro del interferómetro y divergen), si este es el caso a la salida del divisor de haz se
observa un patrón de franjas cuadriculadas. Este efecto no deseado se debe a que el divisor de
haz actúa como una lámina de caras paralelas (Figura 4).
M1
Divisor de Haz
Láser
α
Divisor de Haz
α
D
(1)
(2)
M3
Figura 4: Doble imagen sobre el divisor de haz.
Buscamos que estos patrones no se solapen, para ello el ángulo de incidencia sobre el divisor del
haz, (α), debe ser lo mas grande posible. Esto implica maximizar la distancia D que separa los
espejos M1 y M3, en la Figura 4.
II. La alineación se debe efectuar con el haz colimado, (para lo que se cuenta con un sistema de dos
lentes y sus respectivos posicionadores), y con la mesa balanceada. En la colimación se debe
cuidar que las reflexiones hacia la fuente,
no ingresen en la cavidad láser.
Retrorreflector
III. Se orientan los espejos M1 y M2 de la
Figura 1, de forma tal que la altura del haz
láser sea la misma que a la salida de la
fuente, sobre M1, M2, y el divisor de haz,
cuidando además que la reflexión que va
desde M2 al retrorreflector no caiga sobre
alguna de las aristas de éste, (ver Figura 5).
Luego se traban M1 y M2.
Haz láser
Aristas del cubo
retrorreflector
Figura 5: Cara lateral del retrorreflector
5 de 10
Copia No Controlada
PEO02: Diciembre 2014
IV. Se retira el retrorreflector del riel, y se orienta M3 y el divisor de haz de forma tal que los haces
reflejados por M2 y M3 coincidan. Esto implica que sobre M1 y M3 se observa una sola imagen,
(Figura 6), y que a la salida del divisor de haz podrá observarse un patrón de interferencia. De
esta manera el sistema se encuentra alineado en altura.
Divisor de haz
M2
M3
Figura 6: Alineación de los espejos
V. Se coloca el retrorreflector sobre el riel. Sobre cada cara se coloca una lámina de papel que
utilizaremos como referencia para controlar la alineación del riel que sostiene el
retrorreflector, respecto de los espejos M2 y M3.
Con el retrorreflector en uno de los extremo del riel, se marca sobre el papel la proyección del
haz sobre éste. Aún no alineado, si se desplaza el retrorreflector a lo largo del riel se observará
que el haz se aleja de la marca en forma lateral, (diZ
rección Y de la Figura 7), si además se observan variaciones en dirección Z, primero se deberá repetir III y
marca
IV.
Las variaciones laterales observadas en dirección Y, se
retrorreflector
Y
corrigen desplazando el riel respecto de alguno de sus
extremos, como se muestra en la Figura 8.
Se deberá controlar a ambos lados del retrorreflector
Haz láser
que tal variación haya desaparecido, si bien al corregir uno de los lados, automáticamente se deberían estar corrigiendo la otra. Si esto no sucede se debe reriel
iniciar el proceso de alineación.
Figura 7: Referencia para la alineación del
riel
Divisor de haz
retrorreflector
M2
M3
Riel
Figura 8: Alineación del riel
VI. A la salida del divisor del haz deberá observarse un patrón de franjas concéntricas, que no
cambia de posición a medida que el retrorreflector se desplaza por el riel, (las direcciones Z e Y
de la Figura 7 no cambian). Restará ahora centrar el patrón de anillos, (el cual a simple vista se
observará “simétrico”) sobre el detector, con el divisor de haz.
VII. La situación ideal se alcanza cuando en ambos extremos del riel, a la salida del divisor de haz se
observa el centro del patrón de anillos sobre el detector, el haz no cae sobre ninguna de las
aristas del cubo retrorreflector, y la re absorción sobre la fuente es mínima. Situación que se
alcanza ante sucesivas aproximaciones, esto es repitiendo los pasos III, IV, V y VI en forma
iterada.
6 de 10
Copia No Controlada
PEO02: Diciembre 2014
1. ALINEACIÓN DEL DETECTOR
I. Los dos haces deben superponerse sobre la superficie sensible del detector (Figura 9).
A pesar de que los haces se coliman, a lo largo de su trayectoria puede llegar a observarse una
divergencia en los mismos, con lo cual los diámetros no se mantienen constantes en su recorrido. Así cuando el retrorreflector se encuentra en uno de los extremos del riel,
uno de los haces que llega al fotodetector presenta un diámetro mayor que el
Superposición de dos
otro. Si el divisor de haz no es 50/50, uno
haces
de los haces será más intenso que el otro.
En este caso conviene bloquear el haz
más intenso y colocar el retrorreflector
Superficie sensien el extremo tal que el haz menos inble del detector
tenso alcance su menor diámetro. En estas condiciones se ajusta el detector en
altura, y haciéndolo girar sobre sí mismo
se busca el plano donde se alcanza el
máximo valor de tensión continua que
se aprecie en el osciloscopio.
Figura 9: Alineación del detector
II. Se podrá concluir que el sistema se
encuentra alineado y entonces proceder a la alineación del segundo láser cuando la señal de
tensión continua sobre el osciloscopio no varíe en el tiempo, (la sinusoidal no suba y baje) y la
diferencia pico a pico se mantenga constante. Prueba que se debe efectuar con el láser patrón
estabilizado, (esto es sobre alguna línea de transición).
2. LÁSER A CALIBRAR, LI
La alineación se debe efectuar con el haz colimado, y se debe cuidar que las retroreflexiones, no ingresen a la cavidad láser.
I. Los espejos M1, M2, M3 y divisor de haz
se deben trabar, para evitar tocarlos por
error, ya que la alineación del láser a
calibrar se realiza tan solo colocándolo
en forma paralela al láser patrón. Para
ello se agregan al interferómetro los
espejos M4 y M5, de la Figura 3. M4 y M5
se posicionan de forma tal que sobre una
grilla de papel se observe que las
proyecciones
de
ambos
láseres
mantienen siempre la misma separación
entre sí, a lo largo de todo el recorrido
que va desde M5 y M1 (Figura 10).
Procedimiento que se repite con los
haces a la salida de M1, (desde M1 hasta
M2 de la Figura 3).
Láser calibrar
M4
Láser de referencia
M1
M5
Grilla de
referencia
Figura 10: Alineación del láser a calibrar, LI.
Alcanzada esta situación, se deberá observar sobre el detector B el patrón de franjas en forma
similar al observado con el láser patrón , es decir que la posición de los máximos y mínimos no
varia mientras el retrorreflector se desplaza, y que el haz no caiga sobre alguna de las aristas del
retrorreflector.
II. Para la alineación sobre el detector se debe tener en cuenta lo mismo que en el caso del LP.
7 de 10
Copia No Controlada
PEO02: Diciembre 2014
III. El sistema de ambos láseres estará listo para empezar a medir, cuando al adquirir el cociente de
señales A/B en el contador, se observe que los primeros 7 dígitos se mantienen constantes.
Ejemplo: A/B = 45,93222xxx. Esta situación se da si el LI tiene una estabilidad en su longitud de
8
onda del orden de una parte en 10 . Si el láser tiene menor estabilidad será mayor el número de
cifras significativas que varíen en el contador.
MEDICIÓN
Para la calibración del LI se requiere adquirir en el mismo intervalo de tiempo, y en forma simultánea
el número de máximos consecutivos leídos por cada uno de los detectores, mientras el retrorreflector
se desplaza.
Para ello el sistema electrónico “Lambda - Meter” cuenta con dos entradas para los detectores A y B,
dos salidas digitales y dos analógicas, (Figura 11). Las salida analógicas se pueden conectar a un osciloscopio, y así controlar que la tensión pico a pico de cada una de las señales se mantenga constante
en el tiempo, y que la tensión continua no fluctué a medida que el retrorreflector se desplaza, (esto
último indicaría que la alineación sobre el detector no es correcta). Las salidas digitales se conectan al
frecuencímetro, (contador) ♦.
El trigger del Lambda Meter se activa cuando la señal que le llega se desfasa, esto sucede cuando el retrorreflector cambia de sentido o la señal se ve obturada. En este caso la medición se inicia desde el
instante en que el retrorreflector recibe el pulso, momento en que la señal sufre variaciones bruscas,
debido a que el retrorreflector se acelera. Para evitar medir a lo largo de este período de “transición”, y
hacerlo cuando el movimiento es prácticamente a velocidad contante (Figura 12), se construyó un circuito que permite retardar el disparo de la medición entre 0,5 s y 2 s con un pulso de 5 V, respecto del
defasaje de la señal, es decir desde el instante que el retrorreflector cambia de sentido. De esta manera la medición se inicia cuando el retrorreflector viaja prácticamente a velocidad constante.
El circuito se conecta entre el lambda meter, (trigger), y el frecuencímetro, (señal externa).
Figura 11: Esquema de la electrónica empleada para la medición del cociente de frecuencias A/B
♦
Para más detallEs ver manual lambda meter LM-11
8 de 10
Copia No Controlada
PEO02: Diciembre 2014
Señal
M2
M3
retrorreflector
riel
∆T = 4s
∆T = 2s
Figura 12: Esquema del funcionamiento del retraso del trigger.
Las mediciones A/B realizadas, (ver ecuación (1.5)) se efectuaron con un retraso del trigger de 2
segundos, registrando el número de cuentas a lo largo de 4 segundos como se esquematiza en la
Figura 12. Para ello se ajusta en 2 segundos el retraso del trigger directamente sobre el circuito,
(ver Figura 13), y en el frecuencímetro se programaron los 4 s que dura la medición según lo indicado en la Tabla 1.
Trigger
Auto
Función
Function ratio 1 to 2
impedancia
50 ohm
Gate & arm
external
Acoplamiento
AC
Start
negativo
Atenuación
X 10
Stop
4 segundos
Tabla 1: Programación del contador
VCC 12V
PWRPAD
VCC 12V
PWRPAD
tDelay = 1.1 (R1 + R2) C1
Delay
0.7 s < Dt < 1.9 s
C3
0.1uF
R2
R1
0
300k
500k
U2
7
5
4
6
2
C2
0.01uF
C1
2.2uF
R3
3
OUT
1
1k
2
CV
RST
THR
TRG
BNC
D3
0
BZX84C51/SOT
8
VCC
0
10k
0
J1
J2
R5
DSCHG
NE555
0
R4
1
Q1
BC547
10k
2
ALIMENTACION
BNC
0
0
R1:
R2:
R3:
C1:
C2:
C3:
U2:
Q1:
D1,
VCC
300 kOHM
500 kOHM variable
10 kOHM
2.2 uF
0.01 uF
0.1 uF
555
BC547
D2: Diodos ZENERS 5.1 V
= 12 V
J3
U3
1
2
1
VIN
VCC 12V
VOUT
3
PWRPAD
PHONE JACK-O
7812
C4
CAPACITOR
0
0
Title
LAMBDA METER TRIGGER DELAY (RJI)
Size
A
Date:
Document Number
Ver 1.00 RJI
Friday , March 17, 2006
Rev
1
Sheet
1
of
1
Figura 13: Esquema del circuito de retardo de trigger.
9 de 10
Copia No Controlada
PEO02: Diciembre 2014
La medición se efectúa con el láser patrón estabilizado, lo que se logra sintonizando con el potenciómetro de la fuente del láser una de las líneas de absorción.
El láser patrón de INTI presenta 7 líneas de absorción j, i, h, g, f, e, d∗ . Para reconocer cada una de estas líneas se conecta un osciloscopio a la fuente del láser patrón, (Ver Figura 11), se va incrementando
el potenciómetro, y cuando sobre la pantalla se observa una “sonrisa”,( ∪ ), resulta que se está sobre
una de las líneas. Para obtener una mayor estabilidad, se recomienda trabajar con las líneas que aparecen cuando el potenciómetro se encuentra en el “centro” de la escala. (esto es pasando la primera
figura de Lissajous de máxima intensidad en forma de “8”que se observa en el osciloscopio)♠.
Se realizan 10 mediciones sobre la línea f.
La determinación de la longitud de onda incógnita, involucra el cálculo del índice de refracción, (más
estrictamente del cociente de índices de refracción, ver ecuación.(1.5)), por lo que es necesario, conocer los valores de presión, temperatura y humedad relativa a lo largo de la medición, y así a partir de
la fórmula de Edlen♣ calcular el índice de refracción en cada caso. Para ello se registran estas cantidades al comenzar y al finalizar la medición (que dura del orden de 5 minutos), luego se realiza un
promedio y se utilizan estos valores en los cálculos.
El certificado de calibración se confecciona de acuerdo con lo establecido en el Capítulo 9 del MC y en
el PG 05, ambos del INTI - Física y Metrología.
Medidas de seguridad:
No mirar directamente el haz láser ni sus reflexiones
No utilizar pulseras, anillos, relojes, colgantes o cualquier elemento reflectivo a la hora de alinear,
esto puede causar daños a terceros o a uno mismo.
Durante la alineación, tener control sobre en que dirección salen las reflexiones de los espejos y
del BS
1.1. Registro de la calidad
Archivo de protocolos de medición y certificados
Se realiza según se indica en el Capítulo 11 del MC.
2. Listado de apéndices
APÉNDICE Nº
TITULO
1
Planilla de registro de datos de la calibración
2
Cálculo de la incertidumbre de medición
3
Modificaciones del Lambda Meter
4
Análisis de Temperaturas sobre de la mesa 2012
5
Análisis de Temperaturas sobre de la mesa 2012
♠
Para mas detalle ver manual Iodine-Stabilizad He-Ne Laser. Version: PMT-He-99
♣
K. P. Birch and M. J. Downs. Metologia, 1993,30,155-169
10 de 10
Copia No Controlada
PEO02 Apéndice 1: Diciembre 2014
Planilla de registro de datos de la calibración
1 de 1
Copia No Controlada
PEO02 Apéndice 2: Diciembre 2014
Cálculo de la incertidumbre de medición
Incertidumbre de Medición Lambda-meter.
Modelo matemático
Sea
λiC la longitud de onda incógnita, λrC la longitud de onda de la línea f del láser patrón, ambas en
el vacío, ni , nr los índices de refracción del aire correspondientes a los recorridos del láser incógnita y
del láser patrón respectivamente, A el número de máximos de intensidad del láser patrón y B el
número de máximos de intensidad del láser a calibrar, para una misma diferencia de caminos ópticos
resulta:
1 A
λ ic =
n
i λ rc
k 50 B k n
r
Para una serie de N mediciones, la longitud de onda incógnita,
longitud de onda de la línea f del láser patrón,
λ
N A
∑
1 k = 1 B k
=
ic
N
50
λrC , resulta:
n
i
n
r
λiC , obtenida por comparación con la
λ rc
(2) Ojo cambié n por N
1 A n i
=
λ ic 50 B n λ rc
r
(1)
(3)
Siendo para la línea f, el valor de incertidumbre de la longitud de onda λi:
2
2
2
C
A
λ ic ) = λ u (λrC ) + C A S ( B ) + C n u (n i ) +
rc
i
B
u2(
+ 2 r A B ,
n
i
C Cn S
n A B n ri
r
( )u(
A
B
ni
nr
(
2
C n u (n r ) +
r
)
) + 2 r n , n C n r C n r u(n i ) u(n r )
i
r
(4)
Con r(i,j,) el coeficiente de correlación entre i y j.
La incertidumbre de medición de ic es:
λ
1 de 3
Copia No Controlada
PEO02 Apéndice 2: Diciembre 2014
n
2
1 A i
u (λ ic ) = B
50
n
r
2
n
1 i
u (λ rc) + 50
n
r
2
A
λ rc S( B ) +
2
n
1 A 1
1 A λ i u ( n )
+ 50 B rc 2 r +
50 B λ rc n
nr
r
2
u ( n i ) +
2
1
λ n i A S A u (n i ) − n i u (n )
r
rc
50
n r B B n r
(n r )2
2
n i 1 A
λ rc u (n i )u (n r )
− 2r n ,n
i
r
(n r )3 50 B
n
+ 2 r A , i
B n
r
(
( )
(5)
2
)
Reagrupando el segundo renglón de la ecuación (5)con el último se obtiene:
2
2
n
n
2
1 i
1 A i
A
u (λic ) = B u (λ rc) + λ rc S( B ) +
50
50
n
n
r
r
2
n
1 A 1
1 A i
+ B λ rc 2 u ( n r ) − B λ rc u ( n i ) +
50
50
n
nr
r
u (n i )
n
− i 2 u (n r )
(n r )
n r
( )
2
n 1
n
+ 2 r A , i λ rc i A S A
B n 50
n r B B
r
(6)
2
Es fácil ver que cuando los índices de refracción son iguales, o lo que es lo mismo las longitudes de
onda son las mismas el valor de incertidumbre disminuye como es de esperarse, ya que este término
se cancela como se evidencia en la ecuación.(6).
Lo que no mejora sustancialmente el valor de incertidumbre de otro caso, ya que el término predominante en el cálculo de éste está dado por el contador, (el desvío estándar que se obtiene).
Con
N
A
B
k =1
∑( )
SA =
B
K
N
∑ A B
l
− l =1
N
N −1
2
(7)
2 de 3
Copia No Controlada
PEO02 Apéndice 2: Diciembre 2014
•
u (λr ) es la incertidumbre estándar del láser patrón y u (n) la incertidumbre estándar
del índice de refracción, (formula de Elder ♦).
•
Para la incertidumbre de calibración se tuvo en cuenta la correlación entre los parámetros
A ni
y
B nr
con un factor de correlación r=-0,04.
Debido al valor del coeficiente este término termina siendo despreciable frente a la correlación de los índices de refracción.
•
Para la incertidumbre de calibración se tuvo en cuenta la correlación entre los parámetros ni , y nr con un factor de correlación r=1.
•
La resolución del contador es del orden de10 , lo que resulta despreciable frente al desvió estándar s ( A B ) por lo que no se tuvo en cuenta.
-7
La incertidumbre de calibración es:
U(λ) = 2.u (λ ic )
♦
K. P. Birch and M. J. Downs. Metologia, 1993,30,155-169
3 de 3
Copia No Controlada
PEO02 Apéndice 3: Diciembre 2014
Modificaciones del Lambda Meter
Durante el trabajo de puesta en marcha del interferómetro se realizaron algunas modificaciones al
sistema original del interferómetro, algunos cambios fueron esenciales para que el sistema midiera
correctamente y otros fueron en pos de simplificar el trabajo de alineación. Los cambios realizados se
enumeran a continuación.
a)
Las primeras pruebas realizadas con el lambda meter demostraron que la intensidad de nuestro láser patrón (100W) n o alcan zaba p ara la lectu ra de fran jas.Este problema se solucionó
cambiando las multiplicaciones de los circuitos pre-amplificadores del Lambda Meter y los
dos operacionales para mantener el ancho de banda. Se reemplazaron las resistencias de 5 kΩ
de los circuitos pre-amplificadores, por resistencias de 33 kΩ (amplificación 33) para el canal
A y 50 kΩ (amplificación 50) para el canal B. se reemplazaron los operacionales OP-27 por operacionales OP-37.
b) Se reemplazó el contador de frecuencias por uno que permita medir dos señales en forma simultánea. De la ecuación (1.2) del cuerpo del procedimiento resulta evidente que, salvo en el
caso ideal en que el retrorreflector se desplazara a velocidad constante, para que (1.3) resulte
válida el cociente A/B se debe adquirir midiendo en forma simultánea la señales A y B. El frecuencímetro que el interferómetro tenia adjudicado no era capaz de leer las señales de los detectores A y B en forma simultánea, por lo cual fue que reemplazado por un contador Hewelet
Packard 53132A del Departamento de Electrónica de INTI.
c) Se colimaron los haces. Para mejorar el contraste de franjas del patrón de interferencia que se
obtiene a la salida del divisor de haz, se colimó el haz a la salida de la fuente. Esto se realizo
mediante un sistema de dos lentes, (a falta de una lente colimadora).
d) Se bajó la altura del interferómetro en función de minimizar las vibraciones sobre el mismo,
se instalaron fijaciones y sujeciones de mayor rigidez, (algunas realizadas en INTI).
Se recomiendan más mejoras al sistema, de implementación sencilla y económica, tales como:
• Alineación del fotodetector respecto del patrón de interferencia.
Principalmente esta alineación es determinante para la calidad de señal eléctrica de la cual se obtienen la mediciones. Es necesario contar con un control fino en el posicionado de los detectores,
para ello se requiere de dos posicionadores comerciales que permitan desplazamientos en los ejes
“y” y “z”.
• La separación entre el riel de guía del retrorreflector y el divisor de haz.
El límite de este parámetro está determinado por el espacio disponible en la mesa de trabajo. La necesidad actual de ubicar los láseres sobre la mesa reduce sustancialmente el espacio utilizable. Una
solución sencilla y económica es colocar los láseres en una mesa ant-vibratoria auxiliar y llegar a la
mesa donde se encuentra el Lambda meter con tramos de fibra óptica con sus respectivos conectores
y soportes.
1 de 1
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Análisis de Temperaturas sobre la mesa 2012
Archivo de Julieta: Temp_Lambdameter_Jun2012.opj
Archivo de Griselda: caracterización temperatura labo LM_2012.opj
Temperaturas por medición
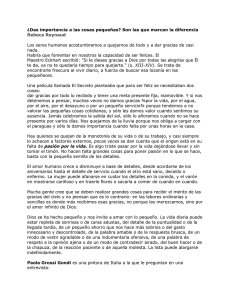
Se colocaron los sensores del sistema Keithley sobre la mesa en las siguientes posiciones:
Elemento óptico
Termómetro
BS
T1
M1
T2
M3
T3
M2
T4
M1, T2
BS, T1
M2, T4
M3,T3
Disposición de los sensores
Archivo de Julieta:
Datos de temperatura durante la calibración del láser TESA Rojo:
Láser rojo medición 1 (22/6/2012,15:21-15:23) ,2 min
Láser rojo medición 2 (22/6/2012,15:27-15:35), 8 min
Láser rojo medición 3 (23/6/2012,13:06-13:16), 10 min
Láser rojo medición 4 (23/6/2012,13:27-13:35), 8 min
Láser rojo medición 5 (23/6/2012,17:08-17:15) ,7 min
Archivo de Griselda:
Caracterización de las Temperaturas del laboratorio durante Junio y Julio de 2012.
Junio: Hay datos desde el 15/6 hasta el 27/6
La conclusión de este trabajo fue:
“Si miramos el promedio de las 4 termoresistencias y los valores de las 4 individualmente, la mejor representación
del conjunto está dada por el T1 , es decir que habría que ubicar la termoresistencia sobre el BS” (cuaderno de
Griselda)
Análisis 2014:
Junio 2012
15 de junio
1 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
19,8
15 de Junio
00:00-8:00 hs
Temperatura
19,5
19,2
18,9
18,6
T1 corr
T2corr
T3corr
T4corr
promedio
18,3
03:09:09
06:16:27
Hora
Fig.1: Temperaturas sobre la mesa el 15 de junio por la noche, hasta las 8:00 AM aproximadamente.
21,3
15 de Junio
Dia
21,0
20,7
20,4
Temperatura
20,1
19,8
19,5
19,2
18,9
T1corr
T2corr
T3corr
T4corr
promedio
18,6
18,3
18,0
17,7
09:34:59
11:08:37
12:42:16
17:57:47
Hora
Fig.2: Temperaturas sobre la mesa el 15 de junio durante el día.
2 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
15 de Junio
noche
19,5
Temperatura
19,4
19,3
19,2
T1
T2
T3
T4
promedio
19,1
19:59:48
21:50:42
23:41:37
Hora
Fig.3: Temperaturas sobre la mesa el 15 de junio por la tarde/ noche.
Diferencias ente sensores (Gradientes)
0,20
15 de Junio
0,15
0,10
Gradientes
0,05
0,00
-0,05
-0,10
-0,15
T1-T2
T1-T3
T1-T4
-0,20
03:09:09
06:16:27
Hora
Fig.4: Gradientes entre el termómetro 1 y los demás por la noche
15 de junio
Gradientes a la noche 1 (00:00 hasta las 8:00, aprox)
T1-T2:
N total Mean Standard Deviation
Sum
Minimum
Median
256
-0,02008
0,0362
-5,14084
-0,06338
-0,03004
T1-T3:
N total Mean Standard Deviation
Sum
Minimum
Median
256
0,02903 0,05139 7,43212 -0,04291
0,02363 0,15771
T1-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
0,11508
Maximum
Maximum
3 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
256
-0,07425
0,04203 -19,00875
T2-T3:
N total Mean Standard Deviation
256
0,04911 0,03852 12,57296
T2-T4:
N total
256
T3-T4:
N total
256
-0,18477
-0,07149
Sum
Minimum
Median
-0,03099
0,04194 0,18005
-0,01205
Maximum
Mean Standard Deviation
Sum
-0,05417
0,06939 -13,86791
Minimum
-0,27894
Median
-0,04194
Maximum
0,02907
Mean Standard Deviation
Sum
-0,10328
0,09018 -26,44087
Minimum
-0,30427
Median
-0,09032
Maximum
0,02121
Diferencias entre el promedio y los termómetros:
0,15
15 de Junio
Promedio -Termometros
0,10
0,05
0,00
-0,05
-0,10
-0,15
p-T1
p-T2
p-T3
p-T4
-0,20
03:09:09
06:16:27
Hora
Fig.5: Gradientes entre el termómetro 1 y los demás por la noche
Estadística de “promedio menos termómetro”
p-T1:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
256
0,01633 0,01304 4,17937 -0,0283 0,01796 0,0358
p-T2:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
256
-0,00376
0,02536 -0,96147
-0,04034
-0,014 0,09343
p-T3:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
256
0,04536 0,04248 11,61149
-0,01646
0,03953 0,14787
p-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
256
-0,05793
0,04919 -14,82938
-0,18633
-0,04955
0,00934
15 de Junio de 2012 (Día, 09:00-18:00)
Gradientes de Día:
T1-T2:
N total Mean Standard Deviation
Sum
Minimum
201
0,0031 0,31178 0,62346 -1,5558 0,07598 0,33474
T1-T3:
N total Mean Standard Deviation
201
0,09383 0,08871 18,86068
Median
Maximum
Sum
Minimum
Median
-0,27384
0,09392 0,26598
Maximum
4 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
T1-T4:
N total Mean Standard Deviation
Sum
201
0,01188 0,1165 2,38856 -0,18718
T2-T3:
N total Mean Standard Deviation
201
0,09073 0,36117 18,23722
Minimum
Median
0,00893 0,25434
Maximum
Sum
Minimum
Median
-0,29075
0,00818 1,82178
Maximum
T2-T4:
N total Mean Standard Deviation
Sum
201
0,00878 0,38458 1,76511 -0,40417
Minimum
-0,12552
Median
1,79674
T3-T4:
N total Mean Standard Deviation
Sum
201
-0,08195
0,1239 -16,47212
Minimum
-0,29751
Median
-0,07621
Maximum
Maximum
0,45801
Diferencias entre el promedio y los termómetros
promedio-termometros
0,5
0,0
-0,5
-1,0
-1,5
p-T1
p-T2
p-T3
p-T4
09:34:59
11:08:37
12:42:16
17:57:47
Hora
Fig.6: Diferencia entre el promedio y los termómetros durante el día
Estadística de “promedio menos termómetro”
p-T1:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
201
-0,0272 0,06238 -5,46818
-0,13666
-0,02765
0,26222
p-T2:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
201
-0,0241 0,26099 -4,84472
-1,29358
0,05016 0,23296
p-T3:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
201
0,06663 0,11244 13,3925 -0,25071
0,05744 0,5282
p-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
201
-0,01532
0,13577 -3,07961
-0,19851
-0,05634
0,50316
Ahora vamos a ver los mismos parámetros , pero en un período del orden de lo que dura la medición,
entre media hora y 40 minutos.
Para el 15 de Junio, voy a tomar alguno/s periodos de 40 minutos durante el día.
De 10:00 a 10:40
(En este rato, p-T2 tiene un pico).
5 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Gradientes:
2
15 de Junio
Gradientes
1
0
-1
-2
T1-T2
T1-T3
T1-T4
T2-T3
T2-T4
T3-T4
10:08:41
10:18:03
10:27:25
10:36:47
Hora1
Fig.7: Gradientes en un periodo de 40 minutos durante el día
Estadística de los gradientes (en los 40 min):
T1-T2:
N total Mean Standard Deviation
Sum
Minimum
Median
22
-0,73472
0,34024 -16,16377
-1,5558 -0,629 7 -0,24928
T1-T3:
N total Mean Standard Deviation
Sum
Minimum
Median
22
0,21922 0,03602 4,82274 0,11602 0,22159 0,26598
T1-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
22
0,19517 0,0296 4,29373 0,13248 0,19253 0,24111
T2-T3:
N total Mean Standard Deviation
22
0,95393 0,35943 20,98652
T2-T4:
N total
22
T3-T4:
N total
22
Sum
Minimum
Median
0,3653 0,85646 1,82178
Maximum
Maximum
Maximum
Maximum
Mean Standard Deviation
Sum
Minimum
0,92989 0,34858 20,4575 0,40306 0,82105 1,79674
Median
Maximum
Mean Standard Deviation
Sum
-0,02405
0,02379 -0,52901
Median
-0,02514
Maximum
0,03776
Minimum
-0,06441
Diferencias entre el promedio y los termómetros:
6 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Promedio-Termometros
0,5
0,0
-0,5
-1,0
p-T1
p-T2
p-T3
p-T4
10:08:41
10:18:03
10:27:25
10:36:47
Hora1
Fig.8: promedio menos termómetros en un periodo de 40 minutos durante el día.
p-T1:
N total Mean Standard Deviation
Sum
22
0,08008 0,08006 1,76182 -0,03724
p-T2:
N total
22
p-T3:
N total
22
Mean Standard Deviation
Sum
-0,65463
0,2618 -14,40195
Minimum
Median
0,06017 0,26222
Maximum
Minimum
-1,29358
Maximum
-0,25441
Median
-0,57807
Mean Standard Deviation
Sum
Minimum
Median Maximum
0,2993
0,09843
6,58457 0,11089 0,27251 0,5282
p-T4:
N total Mean Standard Deviation
Sum
Minimum
22
0,27525 0,08754 6,05556 0,14865 0,24469 0,50316
Median
Maximum
Otro día:
18 de Junio:
7 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
T1
T2
T3
T4
promedio
Temperatura
19,6
18,9
18,2
09:47:49 11:38:44 13:29:39 15:20:34 17:11:28
Hora
Fig.9: Temperaturas durante el día, el 18 de Junio de 2012.
Gradientes:
0,90
0,75
T2-T3
T2-T4
T3-T4
Gradiente
0,60
0,45
0,30
0,15
0,00
09:47:49 11:38:44 13:29:39 15:20:34 17:11:28
Hora
Fig.10: Gradientes durante el día, el 18 de Junio de 2012.
8 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
T1-T2
T1-T3
T1-T4
0,60
18 de Junio
0,45
0,30
0,15
0,00
09:47:49 11:38:44 13:29:39 15:20:34 17:11:28
Hora
Fig.11: Gradientes durante el día, el 18 de Junio de 2012.
Estadística de Gradientes:
T1-T2:
N total Mean Standard Deviation
Sum
Minimum
Median
55
0,13024 0,11119 7,16313 5,42E-5 0,1096 0,54264
T1-T3:
N total Mean Standard Deviation
Sum
Minimum
Median
55
0,09279 0,05291 5,10364 0,00528 0,08648 0,25354
T1-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
55
0,10223 0,05027 5,6226 0,00339 0,10652 0,27791
T2-T3:
N total Mean Standard Deviation
Sum
Minimum
Median
55
0,1499 0,15334 8,24435 0,00746 0,10888 0,75396
T2-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
55
0,19175 0,14793 10,54621
0,00336 0,14677 0,68278
T3-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
55
0,13729 0,07168 7,55086 0,00879 0,15976 0,2496
Maximum
Maximum
Maximum
Maximum
Maximum
Maximum
Promedio menos temperaturas
9 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
18 de junio
promedio-Termometros
0,2
0,0
-0,2
-0,4
p-T1
p-T2
p-T3
p-T4
09:47:49 11:38:44 13:29:39 15:20:34 17:11:28
Hora
Fig.12: Promedio menos temperaturas, el 18 de Junio de 2012.
Estadística de promedio menos temperaturas
p-T1:
N total Mean Standard Deviation
Sum
55
-0,02114
0,04015 -1,16267
p-T2:
N total Mean Standard Deviation
Sum
55
0,02901 0,14648 1,5958 -0,49485
p-T3:
N total Mean Standard Deviation
Sum
55
0,05056 0,08028 2,78071 -0,24139
p-T4:
N total Mean Standard Deviation
Sum
55
-0,05843
0,09594 -3,21384
Otro dia: Jueves 21 de Junio
Minimum
-0,10076
Median
-0,01357
Maximum
0,04917
Minimum
Median
0,02893 0,29297
Maximum
Minimum
Median
0,06135 0,25911
Maximum
Minimum
-0,21173
Maximum
0,20305
Median
-0,09113
24
23
Temperatura
22
21
20
19
T1
T2
T3
T4
18
17
10:43:17
13:29:39
16:16:01
Hora
Fig.13: Temperaturas, 21 de Junio de 2012.
Gradientes:
10 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Gradientes
1,5
T1-T2
T1-T3
T1-T4
21 deJunio
1,0
0,5
0,0
10:43:17
13:29:39
16:16:01
Hora
Fig.14: Gradientes, 21 de Junio de 2012.
2,5
2,0
T2-T3
T2-T4
T3-T4
T2-T3
1,5
1,0
0,5
0,0
-0,5
09:47:49 11:38:44 13:29:39 15:20:33 17:11:28
Hora
Fig.15: Gradientes, 21 de Junio de 2012.
T1-T2:
N total
55
T1-T3:
N total
55
T1-T4:
N total
55
T2-T3:
N total
55
T2-T4:
N total
55
T3-T4:
Mean Standard Deviation
0,18005 0,1534
9,90279
Sum
Minimum
Median
6,861E-4
0,12866 0,62991
Mean Standard Deviation
0,24435 0,30374 13,43928
Sum
Minimum
Median
0,00182 0,12324 1,63693
Mean Standard Deviation
0,21166 0,14468 11,64124
Sum
Minimum
Median
0,00616 0,20215 0,67504
Mean Standard Deviation
Sum
Minimum
0,13491 0,26631 7,42024 0,00423 0,06032 1,61425
Mean Standard Deviation
0,24951 0,21938 13,72304
Maximum
Maximum
Maximum
Median
Maximum
Sum
Minimum
Median
8,99E-5 0,22405 0,92836
Maximum
11 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
N total Mean Standard Deviation
55
0,31167 0,36589 17,14177
Sum
Minimum
Median
7,9932E-4
0,27445 2,03618
Maximum
Diferencia entre el promedio y los termómetros:
Promedio-Termometros
0,5
0,0
-0,5
-1,0
p-T1
p-T2
p-T3
p-T4
-1,5
10:43:17
13:29:39
16:16:01
Hora
Fig.16: Gradientes, 21 de Junio de 2012.
p-T1:
N total
55
p-T2:
N total
55
p-T3:
N total
55
p-T4:
N total
55
Mean Standard Deviation
Sum
-0,06508
0,14268 -3,57959
Minimum
-0,36327
Median
-0,06416
Mean Standard Deviation
Sum
0,04833 0,13279 2,65796 -0,44659
Minimum
Median
0,03585 0,35178
Maximum
Mean Standard Deviation
Sum
0,05594 0,26697 3,07656 -1,32184
Minimum
Median
0,08528 0,41684
Maximum
Mean Standard Deviation
Sum
-0,03918
0,2383 -2,15493
Minimum
-0,35595
Median
-0,06127
Maximum
0,31509
Maximum
0,76693
12 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Otro día: 22 de Junio de 2012:
Temperaturas:
23
T1
T2
T3
T4
22
Temperaturas
21
20
19
18
17
14:25:06 15:27:24 16:30:08 17:32:52
Hora
Fig.17: Temperaturas , 22 de Junio de 2012.
Gradientes:
T1-T2:
N total Mean Standard Deviation
Sum
Minimum
Median
141
0,19711 0,11885 27,79259
0,0037 0,19193 0,71872
T1-T3:
N total Mean Standard Deviation
Sum
Minimum
Median
141
0,16858 0,13967 23,76935
2,3047E-4
0,1597 0,81882
T1-T4:
N total Mean Standard Deviation
Sum
Minimum
Median
141
0,37486 0,29149 52,85565
0,00392 0,30561 0,98088
T2-T3
N total Mean Standard Deviation
Sum
Minimum
Median
141
0,11165 0,18172 15,74307
4,652E-5
0,05921 1,08899
T2-T4
N total Mean Standard Deviation
Sum
Minimum
Median
141
0,29938 0,23831 42,21212
0,00172 0,24027 1,25259
T3-T4
N total Mean Standard Deviation
Sum Minimum
Median
141
0,2641
0,18635
37,23771
0,00129
0,22635
Maximum
Maximum
Maximum
Maximum
Maximum
Maximum
1,16331
13 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
1,25
T1-T2
T1-T3
T1-T4
1,00
Gradientes
0,75
0,50
0,25
0,00
-0,25
14:25:06 15:27:24 16:30:08 17:32:52
Hora
Fig. 18 : Gradientes , 22 de Junio de 2012.
1,5
T2-T3
T2-T4
T3-T4
1,2
Gradientes
0,9
0,6
0,3
0,0
14:35:08
15:48:19
17:01:30
18:14:42
Hora
Fig.18: Gradientes 22 de Junio de 2012.
14 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Diferencias entre el promedio y los termómetros
T1-p
T2-p
T3-p
T4-p
0,9
Termometros-promedio
0,6
0,3
0,0
-0,3
-0,6
14:25:06 15:27:24 16:30:08 17:32:52
Hora
Fig.19: Termómetros- promedio , 22 de Junio de 2012.
T1-p
N total
141
T2-p
N total
141
T3-p
N total
141
T4-p
N total
141
Mean Standard Deviation
0,15581
0,13574
Sum
Minimum
Median
Maximum
21,96937
-0,08894
0,12297
0,44852
Mean Standard Deviation
Sum
-0,00294
0,14957 -0,41409
Mean Standard Deviation
0,01186
0,10215
Minimum
-0,32121
Median
-0,02506
Maximum
0,65136
Sum
Minimum
Median
1,67176
-0,34695
Mean Standard Deviation
Sum
-0,16473
0,23067 -23,22704
Minimum
-0,60123
Maximum
0,0062
0,76778
Median
-0,15463
Maximum
0,3092
22 de Junio, 1 h
21,9
Temperaturas
21,6
22 de Junio
T1
T2
T3
T4
21,3
21,0
20,7
20,4
14:45:35
15:02:19
15:19:02
--
Hora
15 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Fig.20: Termómetros, 22 de Junio de 2012.
Gradientes:
1,05
T1-T2
T1-T3
T1-T4
0,90
22 de Junio
Gradientes
0,75
0,60
0,45
0,30
0,15
14:49:46
15:10:41
15:31:35
Hora
Fig.21: Gradientes en 1h , 22 de Junio de 2012.
0,7
0,6
T2-T3
T2-T4
T3-T4
22 de junio
Gradientes
0,5
0,4
0,3
0,2
0,1
0,0
14:49:46
15:10:41
15:31:35
Hora
Fig.22: Gradientes en 1h , 22 de Junio de 2012.
T1-T2:
N total Mean Standard Deviation
31
0,23799 0,06967
0,4269
T1-T3:
N total Mean Standard Deviation
31
0,27508
0,08007
0,47866
T1-T4:
N total Mean Standard Deviation
31
0,73531
0,1231
0,98088
Sum
Minimum
7,37773
Median
0,13409
Sum
Minimum
Median
8,5276
0,1578
Sum
Minimum
22,79476
54502
Maximum
0,23052
Maximum
0,25794
Median
Maximum
0,73498
16 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
T2-T3:
N total
31
T2-T4:
N total
31
T3-T4:
N total
31
Mean Standard Deviation
Sum
0,05353 0,03686
1,65944
Minimum
6,2979E-4
Median Maximum
0,04863
0,11718
Mean Standard Deviation
0,49732 0,08546
Sum
Minimum Median Maximum
15,41703
,32976
0,4935 0,67334
Mean Standard Deviation
0,46023
0,06917
Sum
Minimum
14,26716
Median Maximum
0,37725 0,44165
0,58538
Termometros-promedio:
0,4
22 de Junio
Termometros-promedio
0,2
0,0
-0,2
-0,4
-0,6
T1-p
T2-p
T3-p
T4-p
14:49:46
15:10:41
15:31:35
Hora
Fig.23: Termómetros- promedio (Periodo de1h min), 22 de Junio de 2012.
T1-p:
N total
31
T2-p:
N total
31
Mean Standard Deviation
Sum
0,3121 0,06338
9,67502
Minimum
Median
Maximum
0,22704
0,31358
0,44852
Mean Standard Deviation
Sum
0,07411 0,03429
2,29729
0,1355
Minimum
Median
0,01184
Maximum
0,07471
T3-p:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
31
0,03701 0,03059
1,14742
-0,03657
0,0344 0,1167
T4-p:
N total Mean Standard Deviation
Sum
Minimum
Median
Maximum
31
-0,42322
0,06498
-13,11974
-0,5552
-0,43379
0,31792
17 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
Conclusiones :
(La idea es leer lo que sigue, mientras se mira el otro archivo que tiene gráficos y datos. También está
el esquema de donde estaban los sensores)
En el año 2013 calibramos la longitud de onda del laser TESA verde. Para medir el índice de refracción
del aire utilizamos, un único sensor del sistema KEITHLEY para medir la temperatura del aire, el termohigrómetro TES para medir la humedad y el barómetro DRUCK que usamos en el sistema TESA para medir la presión. La calibración se realizo un día de semana durante el mes de diciembre.
En el 2012 se realizo una caracterización de las temperaturas sobre la mesa óptica, sobre la que se arma el sistema interferometrico del lambdameter. Se colocaron las cuatro termorresistencias del sistema KEITHLEY sobre la mesa, en las inmediaciones de los distintos elementos ópticos. Para hacer el
análisis se tomaron datos durante los meses de junio y julio.
La conclusión de este trabajo fue que se puede utilizar un único termómetro sobre el centro de la mesa (con una incertidumbre en temperatura de 1.5ºC).
Para este análisis se tomaron algunos días del mes de junio de 2012 (15,18,21 y 22 de junio).Se analizaron datos de días durante la semana, en una franja horaria diurna (desde la mañana hasta las 18 hs
aproximadamente)
Se eligieron estos datos porque en el 2013 se calibro durante la semana y durante el día.
Gradientes:
Se calcularon los gradientes entre todos los pares de sensores. A continuación tenemos el promedio de
estos gradientes junto con los máximos y mínimos que hayan ocurrido entre los distintos pares.
15 de Junio:
El gradiente promedio en todo el día es del orden de las 2 centésimas de grado. Hay un mínimo de 1.5ºC y un máximo de 1.8ºC.
18 de Junio:
El gradiente promedio es del orden de la centésima. El mínimo es de 5.42E-5 ºC y el máximo es de
0.7ºC.
21 de Junio:
El gradiente promedio es del orden de 2 centésimas. El mínimo es de 8E-4 ºC y el máximo es de 2 ºC.
22 de Junio:
El gradiente promedio es del orden de 2 centésimas. El mínimo es de 4.6E-5 y el máximo es de 1.2 ºC.
La calibración suele durar en el orden de 20 minutos y media hora.
Para el día 15 de junio analizamos los gradientes durante un periodo de tiempo de 40 minutos:
El gradiente promedio, en 40 minutos ,fue de 2 centésimas. El mínimo fue de -1.5 ºC y el gradiente
máximo fue de 1.8 ºC.
Para el 22 de junio tomamos un periodo de una hora:
El gradiente promedio fue de 4 centésimas. El mínimo fue de 6.3E-4,y el máximo fue de 1 ºC.
Sensor Caracteístico:
Para los mismos días se calculo p-T (o T-p).p es el promedio de los cuatro sensores. T es la temperatura
de algún sensor. Esto da una idea de si el sensor sigue al promedio o no.
15 de Junio:
T2 sigue mejor al promedio durante todo el dia.
18 de junio:
T1 y T2
21 de Junio:
Todos son parecidos
22 de Junio:
T2
En los periodos de tiempo más cortos:
15 de junio (40 min):
T1
22 de junio (1h):
T2 y T3
Los picos de los p-T (o T-p) son, en general, más chicos que los picos de los gradientes para todos los
sensores.
18 de 19
Copia No Controlada
PEO02 Apéndice 4: Diciembre 2014
En el sistema del lambdameter se comienza cuando el sistema está alineado, y durante la medición se
podría tener gradiente del orden de 2ºC (El peor caso que aparece).
19 de 19
Copia No Controlada
PEO02 Apéndice 5: Diciembre 2014
Índice de refracción. Ecuación de Edlén
Referencias:
1)Correction to the Updated Edlén Equation for de Refractive Index of Air
Birch, K.P; Downs M.J, Metrologia, 1994,31, 315-316
2) A Guide to the Measurement of Humidity
NPL, National Physical Laboratory
A partir de las referencias 1y2 podemos escribir una expresión para el índice de refracción del aire a
partir de los parámetros ambientales que medimos. En este caso medimos temperatura (T), presión (p)
y humedad relativa (HR).
El índice también depende de la longitud de onda de la luz que estemos considerando.
Para hacer las cuentas hay que tener en cuenta que en la ecuación 3 de 1, en donde se da el índice de
refracción, aparece la variable f, que es la presión parcial del vapor de agua que contiene el aire.
Existe una relación entre f y HR que podemos escribir utilizando las ecuaciones 5 y 9 de la página 53
de 2:
𝑓
𝐻𝑅 = 100
(5)
𝑓𝑆
fs es la presión de saturación del vapor, que está dada por la ecuación (9):
𝑙𝑛𝑓𝑆 = −6096.9385𝑇 −1 + 21.2409642 − 2.711193 × 10−2 𝑇 + 1.673952 × 10−5 𝑇 2 + 2.433502𝑙𝑛𝑇
En donde T, es la temperatura en grados Kelvin (!!).
A partir de estas dos ecuaciones tenemos f en función de HR y T.
Otra cosa a tener en cuenta, es que en 1,2 y 3 de 1, la presión se considera en Pa, la longitud de onda
en µm y la temperatura en °C.
En general, la presión la medimos en mbar y la longitud de onda en nm (!!). Teniendo en cuenta todo
lo anterior podemos escribir el índice de refracción de la siguiente manera:
𝐻𝑅
𝑛𝜆 (𝑝, 𝑇, 𝐻𝑅, 𝜆) = {1 + 𝑓1 (𝑝)𝑓2 (𝜆)𝑓3 (𝑝, 𝑇)} − �
𝑓 (𝑇)𝑓5 (𝜆)�
100 4
Donde:
𝑝 × 10−6
𝑓1 (𝑝) =
96095.43
𝑓2 (𝜆) = 8342.54 +
𝑓3 (𝑝, 𝑇) =
2406147
15998
+
𝜆 −2
𝜆 −2
)
)
130 − (
38.9 − (
1000
1000
1 + 𝑝 × 10−6 (0.601 − 0.00972𝑇)
1 + 0.0036610𝑇
𝑓4 (𝑇) = 𝑒𝑥𝑝{−6096.9385𝑇 −1 + 21.2409642 − 2.711193 × 10−2 𝑇 + 1.673952 × 10−5 𝑇 2 + 2.433502𝑙𝑛𝑇}
𝑓5 (𝜆) = (3.7345 − 0.0401 �
𝜆 −2
� ) × 10−10
1000
En estas expresiones p va en mbar, λ en nm, T va en °C, salvo en 4f(T),que va en °K.
1 de 1