Unidad 2: SEÑALES Y SISTEMAS EN TIEMPO DISCRETO
1. Definición de Señales en tiempo discreto (secuencias)
Se denomina señal de tiempo discreto a aquella señal que es función de
una variable de tiempo discreto t en n, donde n toma sólo valores enteros.
Asimismo se dice que la variable de tiempo t es una variable de tiempo
discreto, si t toma los valores discretos
Las señales discretas se representan con una secuencia de números
denominados muestras, una muestra de una señal o secuencia se denota por
x[n] siendo n entero en el intervalo − ∞ < n < ∞ (x[n]=x[nT]).
x[n] está definida únicamente para valores enteros de n, una señal en
tiempo discreto se representa como {x[n]}. Las señales discretas se pueden
representar como una secuencia de números entre paréntesis ( ) n {x[n]} = {−
0.2, 2.2,1.1,0.2,− 3.7, 2.9}; x(n) = 1 4
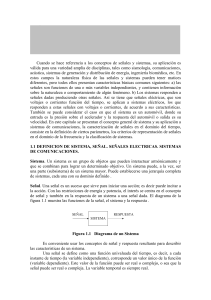
2. Definición de Sistemas en tiempo discreto
Un sistema en tiempo discreto es un operador matemático que transforma
una señal en otra por medio de un grupo fijo de reglas y funciones. La notación
T[.] es usado para representar un sistema general, tal como se muestra en la
Figura 1. en el cual, una señal de entrada x(n) es transformada en una señal de
salida y(n) a través de la transformación T[.]. Las propiedades de entradasalida de cada sistema puede ser especificado en algún número de formas
diferentes
Clasificación de los Sistemas Discretos Tanto en el análisis como en el diseño
de sistemas es conveniente realizar una clasificación de los mismos según las
propiedades generales que lo satisfacen. De hecho, las técnicas matemáticas
que se desarrollan para analizar y diseñar sistemas en tiempo continuo
dependen fuertemente de las características generales de los sistemas que se
consideren. Por esta razón, es necesario desarrollar una serie de propiedades
y categorías que puedan usarse para describir las características generales de
los sistemas en tiempo discreto. Se debe destacar que, para que un sistema
disponga de una propiedad determinada, está debe cumplirse para cada señal
posible en la entrada del sistema. Si una propiedad se satisface para algunas
señales de entrada pero no para otras, el sistema no posee tal propiedad. En
ese caso, un contraejemplo es suficiente para demostrar que un sistema no
posee tal propiedad. Estos son: sistemas estáticos y sistemas dinámicos,
sistemas invariantes e variantes en el tiempo, sistemas lineales y no-lineales,
sistemas causales y no causales, sistemas estables e inestables
3. Representación gráfica de una señal en tiempo discreto