Documento 3990261
Anuncio

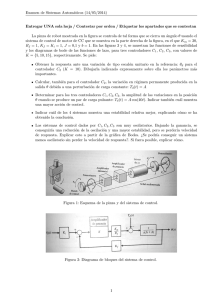
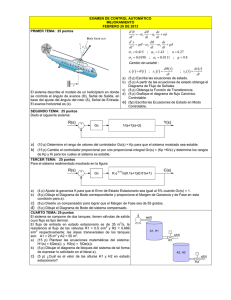
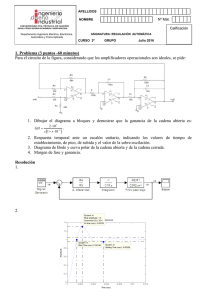
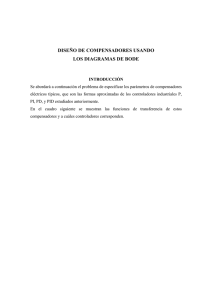
Examen de Sistemas automá'cos Convocatoria de Mayo 2012 31/05/2012 Problema 1 Supóngase el siguiente sistema de control de un proceso industrial: w r + – C(s) u G1(s) + + G2(s) Se pide: 1. Diseñar un controlador C(s) de la forma: y proceso donde, 50 20 G1 (s) = G2 (s) = s + 50 s + 10 Importante: • Se valorará la claridad y concisión en los desarrollos y explicaciones. • Los resultados correctos podrán no tener validez si no se han jus>ficado o si la • jus>ficación no es correcta. Las faltas de ortograXa y los errores en las operaciones podrán penalizar el ejercicio. C(s) = K · s+c s para conseguir una sobreoscilación Mp=5% y un >empo de establecimiento ts = 0.38 segundos u'lizando la técnica del lugar de las raíces. →60% 2. Explicar las posibles diferencias que se obtendrían respecto a las especificaciones anteriores en el seguimiento de referencias de >po escalón, en ausencia de perturbaciones (w=0) y diseñar un prefiltro F(s) que corrija el problema. Reflejar la modificación en el diagrama de bloques (*) →20% 3. Suponiendo que la perturbación w se puede medir con un sensor ideal de ganancia 1, diseñar el bloque de prealimentación Pff(s) que permita reducir el impacto de la perturbación de la carga w. Reflejar la modificación en el diagrama de bloques (*) →20% (*) Dibujar un único diagrama de bloques conjunto para los apartados 2 y 3. Diseño del controlador Diseño del prefiltro a la entrada Diseño de la prerealimentación de la perturbación Simulación en Simulink Apellidos, Nombre: DNI: Cuestión Se han diseñado tres controladores diferentes para un único proceso industrial. En la figura 1 se puede ver el trazado de los diagramas de magnitud de las funciones de sensibilidad obtenidas con cada uno de los controladores. S T 10 Si Su 10 10 50 0 0 40 -10 -10 30 -20 -20 20 0 -30 -40 Magnitude (dB) -20 Magnitude (dB) Magnitude (dB) Magnitude (dB) -10 -30 -40 10 0 -30 -50 -40 D1 D1 D2 D2 -60 D3 -50 0 10 Frequency (rad/sec) 2 -70 10 -50 0 D1 D2 -60 D3 10 Frequency (rad/sec) -10 D1 2 -70 10 D2 -20 D3 0 10 Frequency (rad/sec) -30 2 10 D3 0 10 Frequency (rad/sec) 2 10 Figura 1: Funciones de Sensibilidad En la figura 2 se han representado los diagramas de Bode de las funciones de lazo correspondientes al sistema junto con cada uno de los controladores. ¡Ojo! pueden estar desordenados; no tienen por qué coincidir los tipos de las lı́neas con los de las funciones de sensibilidad. Bode Diagram Magnitude (dB) 50 0 -50 Phase (deg) -100 -45 -90 a b -135 c -180 -1 10 0 10 1 10 Frequency (rad/sec) 2 10 3 10 Figura 2: Bode de las funciones de lazo Explique razonadamente y haciendo alusión a las gráficas pertinentes: a) el tipo del sistema en cuanto a seguimiento de referencias para los tres casos, Sistemas Automáticos 31 de mayo de 2012 b) el efecto de una perturbación senoidal de 1 rad s para los tres casos, c) el comportamiento en cuanto a efectos del ruido de medida en los tres casos, d) el comportamiento en cuanto a estabilidad relativa en los tres casos, e) a qué controlador (D1, D2, D3) corresponde cada uno de los trazados (a, b, c) de la figura 2, f) de qué tipo es cada uno de los controladores (P, PI, PD, PID, ...). g) la estabilidad del proceso en cadena abierta y sin controlador.