Queremos analizar los polos de la transferencia de lazo cerrado en
Anuncio

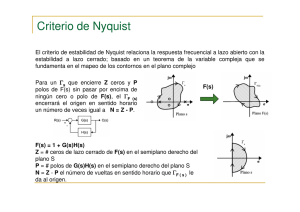
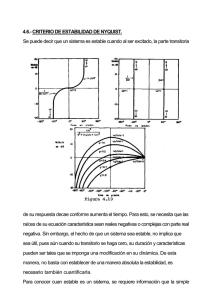
FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA Criterio de Estabilidad de Nyquist. Antes de presentar el criterio de estabilidad de Nyquist, vamos a definir el diagrama polar. El diagrama de la magnitud en función de la fase (con la frecuencia ω como parámetro) en coordenadas polares, es el diagrama polar. Para obtenerlo se hace variar “ω” de cero a infinito. El criterio de “Nyquist” se basa en el análisis de las funciones variable compleja. En dicho análisis establece se una relación entre trayectorias continuas y cerradas en el campo complejo (plano “s”) con trayectorias continuas y cerradas en el campo de la función “F(s)” (imagen de la función de variable compleja “s”). Para cada curva cerrada y continua en el plano “s”, que no pase por ningún punto singular de F(s), corresponde una curva semejante en el plano F(s). Queremos analizar la existencia de polos de la transferencia de lazo cerrado en el semiplano derecho del plano S, ya que estos implican la inestabilidad del sistema al dar soluciones con un factor exponencial de exponente positivo en función del tiempo. Analizamos entonces mediante el teorema de la representación conforme la función de variable compleja que forma el denominador de la transferencia F(s). Cuando esta función (F(s).= [1+G . H] = 0 ) se iguala a cero constituye la ecuación característica del sistema que representa la transferencia (G(TOTAL LAZO CERRADO) ). G(TOTAL LAZO CERRADO) = G(directa)/ [1+G(directa) . H(inversa)] = G/[1+G . H] Donde entonces F(s).= [1+G . H] = 0 es la ecuación característica. Sabemos que los ceros de la ecuación característica (Raíces de la Misma) son los polos de la transferencia total. Son entonces los ceros de la ecuación característica los que no deben estar del lado derecho del plano S para que la transferencia corresponda a la de un sistema estable. Para determinar la existencia de dichos ceros de F(s) en el lado derecho Nyquist aprovechó el teorema de la Representación Conforme ( o del Mapeo) de Funciones de variable compleja que dice: Dada una F(s) , si un determinado contorno cerrado del plano S de la variable compleja encierra un Z de ceros de F(s) y un número de P polos de F(s), cuando la variable S lo recorre sentido horario, el valor representativo de F(s) recorre a su vez un número N = Z – P de rodeos , encierros , circulaciones completas alrededor del origen en el plano F(s) ( en el sentido horario). Dado que F(s).= [1+G . H] se puede escribir (F(s) – 1) = G . H Entonces por simplicidad se representa G . H (Transferencia de lazo abierto) y se analizan los cierto número rodeos, encierros completos alrededor del punto ( –1+0j ) en lugar de hacerlo alrededor de cero. Como lo que interesa es el número de Ceros de F(s) dentro del semiplano derecho del plano S lo que hace Nyquist es definir un camino que encierre este semiplano mediante un lado formado por el eje complejo jw y un semicírculo de radio infinito desde +jw ( con w tendiendo a infinito) hasta –jw (con la misma condición). A este camino se lo denomina: “trayectoria o recorrido de Nyquist ”. Y despeja el número de ceros de la expresión del teorema de la representación conforme. Z =N+P Donde Z es el número de ceros de la ecuación característica del lado derecho del plano S P es el número de Polos de la ecuación característica del lado derecho del plano S FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA N es el número de rodeos que efectúa la representación de G complejo cuando S recorre el recorrido de Nyquist .H alrededor de –1 en el plano en las figuras de abajo podemos ver el recorrido de Nyquist a la izquierda y el de Nyquist modificado a la derecha, éste último con un rodeo infinitesimal del origen con el objeto de eludir un polo (integrador) en el mismo. Pensemos que G.H se puede escribir como un cociente de polinomios en s entonces : G.H = PS QS Q +P ⇒ 1 + G.H = Q S S S vemos que los polos de G.H (transferencia de Lazo Abierto) coinciden con los de 1+G.H (denominador de la transferencia de lazo cerrado) con lo que basta contar los de la primera para tener el número de polos de la segunda con lo que P número de polos de la ecuación característica del lado derecho del plano S coincide con el número de polos de GH en dicho semiplano. Por ejemplo sea la siguiente transferencia de lazo abierto FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA 1 G•H = (S + 4) • (S − 1) . Tiene n polo en –4 y otro en +1 , éste último esta del lador derecho del plano S de donde la transferencia de lazo abierto tiene P = 1 y así mismo la ecuación característica tendrá P = 1. En el siguiente caso tenemos dos polos ( -4 , -2 )del lado izquierdo pero P = 0 pues éste es el número de polos del lado derecho del plano S 1 G•H = (S + 4 ) • (S + 2 ) Hagamos como ejemplo el correspondiente a : GS • H S = K S • (τ .S + 1) Como tiene un polo en el origen debemos utilizar el recorrido de Nyquist modificado, para analizar lo 0 hacemos que ocurre alrededor de S S = δ •e jϕ Es decir escribimos el complejo en forma polar con un módulo infinitesimal , de esta manera estaremos alrededor de cero según un angulo φ. Reemplazando entonces este valor de S en la transferencia de lazo abierto propuesta vemos que el resultado ( G.H) es de módulo infinito y su dirección representada por e − jϕ varía desde +90 hasta –90 mientras que s varía desde –90 hasta +90 rodeando el origen. Ya que la expresión de F(s) resulta: FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA G •H S S = jϕ ( K jϕ ) δ . e • τ .δ . e + 1 y teniendo en cuenta que δ es infinitesimal resulta la expresión simplificada: K − jϕ GS • H S = δ . • e vemos que el ángulo de la función G.H es opuesto al del infinitésimo que circula evitando el origen lo que se aprecia en la figura. Con esta explicación notamos que todo el recorrido alrededor de cero resulta en un recorrido en la representación de GH alrededor de infinito . Con un razonamiento similar podemos ver que el recorrido de Nyquist con s circulando una circunferencia de radio infinito desde +90 hasta –90 grados pasando por ángulo cero queda reducida al origen ,puesto que en este caso el módulo tiende a cero.(ρ ∞) G •H S S = jϕ ( K jϕ ) ρ . e • τ .ρ . e + 1 FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA siendo 1 es un valor fijo y .(ρ ∞) podemos despreciarlo quedando así el valor de G.H en el origen −2 jϕ G •H S S = K .e ρτ 2 vemos que en este caso el ángulo de la representación duplica al de la variable y tiene signo opuesto como se destaca en la siguiente tabla y correspondiente figura S 90 45 0 -45 -90 G.H -180 -90 0 90 180 Los ángulos representan la fase de G.H. en cada punto , es decir la dirección del complejo en el gráfico polar, al ver a continuación (próxima figura) la representación del recorrido del extremo de G.H en su gráfico polar estos ángulos cobrarán el sentido gráfico correspondiente Para analizar la forma del gráfico es necesario ver cuales son las componentes reales e imaginarias de G.H cuando nos movemos sobre el eje “jw” , pues lo restante quedo o bien en el infinito o bien en cero. Debemos nuevamente ver que sucede cuando reemplazamos “s” por “jw”(de manera semejante a cuando obteníamos la transferencia sinusoidal para los diagramas de bode. FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA Así obtenemos: K G S • H S = jω • ( jωτ + 1) Multiplicando por los respectivos conjugados: ( − jω ) • (1 − jωτ ) K G S • H S = jω • ( jωτ + 1) • (− jω ) • (1 − jωτ ) GS • H S = K • (− jω ) • (1 − jωτ ) K • (− j ) • (1 − jωτ ) = 2 2 2 2 2 2 ω • + 1 • 1+ω τ ωτ − j ω GS • H S = ( K • (− j ) • (1 − jωτ ) ( ω • 1 +ω ( ) τ) 2 Re al (G S • H S ) = 2 = ) K • (− j − ω .τ ) ( ω • 1 +ω K • (− ωτ ) ( ω • 1+ω Im aginario (G S • H S ) = τ 2 2 (− K ) ( ω • 1+ω Angulo(G S • H S ) = Arctg ) τ 2 2 ) Im aginario Re al τ 2 2 ) FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA Angulo (G • H S ) = Arctg S ω con que consideremos a ω. 1 ωτ ∞ el ángulo tiende a cero o a ±180 grados dependiendo del signo Se comprueba que cuando vemos también que la parte imaginaria crece con ω →0 pero la parte real tiende a un valor cte : Lim Lim K • (− ωτ ) Re al (G S • H S ) = ω →0 ω → 0 ω • 1 + ω 2τ 2 [ ] ( = (− K .τ ) ) (− K ) Lim Lim Im aginario (G S • H S ) = ω →0 ω → 0 ω • 1 + ω 2τ 2 [ ] ( =∞ ) FACULTAD DE INGENIERIA UBA SISTEMAS DE CONTROL 67 22 MECANICA En resumen para este caso vemos que no hay ninguna circulación completa alrededor de –1 de F(S) lo que corresponde a N= 0. −1 por consiguiente no hay polos de G.H del lado derecho del plano τ S y correspondientemente P = 0, como consecuencia de ello ya que Z= N+P resulta ser Z= 0 , Los polos de G.H son 0 y condición necesaria para la estabilidad del sistema Para que haya estabilidad en el caso que G.H tuviese P polos en el semiplano derecho del plano S el diagrama de G.H (cuando se recorre el camino de Nyquist en sentido horario en el plano S) debe rodear al punto –1+0j el mismo número de veces pero en sentido anti horario para que la suma de Z= 0 Es decir los rodeos horarios alrededor de –1+0j se cuentan como positivos y los antihorarios como negativos. Vemos aquí las instrucciones para Matlab 5.3 que dibujan los num=[1]; grÁficos de Bode y de Nyquist para el sistema: den1=[1,0]; den2=[.5,1]; den=(conv(den1,den2)); sys=tf(num,den); bode(sys); nyquist(sys); 1 G.H = S S • + 1 2